

翻译—伤寒明理论 包含全部章节
第一章:
机器人卡雷尔简介
在二十世纪七十年代,一位名字叫 Rich Pattis 的斯坦福研究生觉得,在编程基础的教学中,如果
学生可以在某种简单的环境中,摆脱大多数编程语言复杂的特性,学习基本的编程思想,可以取
得更好的效果。麻省理工 Seymour Papert’s LOGO 计划的成功,启发了灵感,Rich 设计了一个入
门编程环境,(这个编程环境)让学生教一个机器人来解决简单的问题。这个机器人名字叫卡雷尔。
因为捷克剧作家 KarelCapek 在 1923 年公演了 R.U.R (Rossum’s Universal Robots)后,为英语带来了
机器人这个英语单词--Robot 。
机器人卡雷尔相当成功。 卡雷尔被用于全国的计算机科学入门课程,到了 Rich 的教科书畅销超
过 10 万份的地步。许多学习 CS106A 的学生,通过设计卡雷尔的行为,学会了如何让程序工作。
在 20 世纪 90 年代中期,我们曾经使用的机器人卡雷尔模拟器停止工作了。但是,我们很快就得
到了一个 Thetis 编译的卡雷尔升级版供那时使用。但是,一年以前,CS106A 课程转向到 Java,
卡雷尔再次从课堂上消失了。虽然在过去的三个季度,由于卡雷尔的离去产生的空白,已经完全
被 Nick Parlante 的 Binky world 填补了。但现在是带卡雷尔回来的时候了。新完工的卡雷尔设计
得完全兼容 Java 和 Eclipse 编程环境,这就意味着,你将在这门课程的开始,就可以练习使用
Eclipse 的编辑器和调试器。
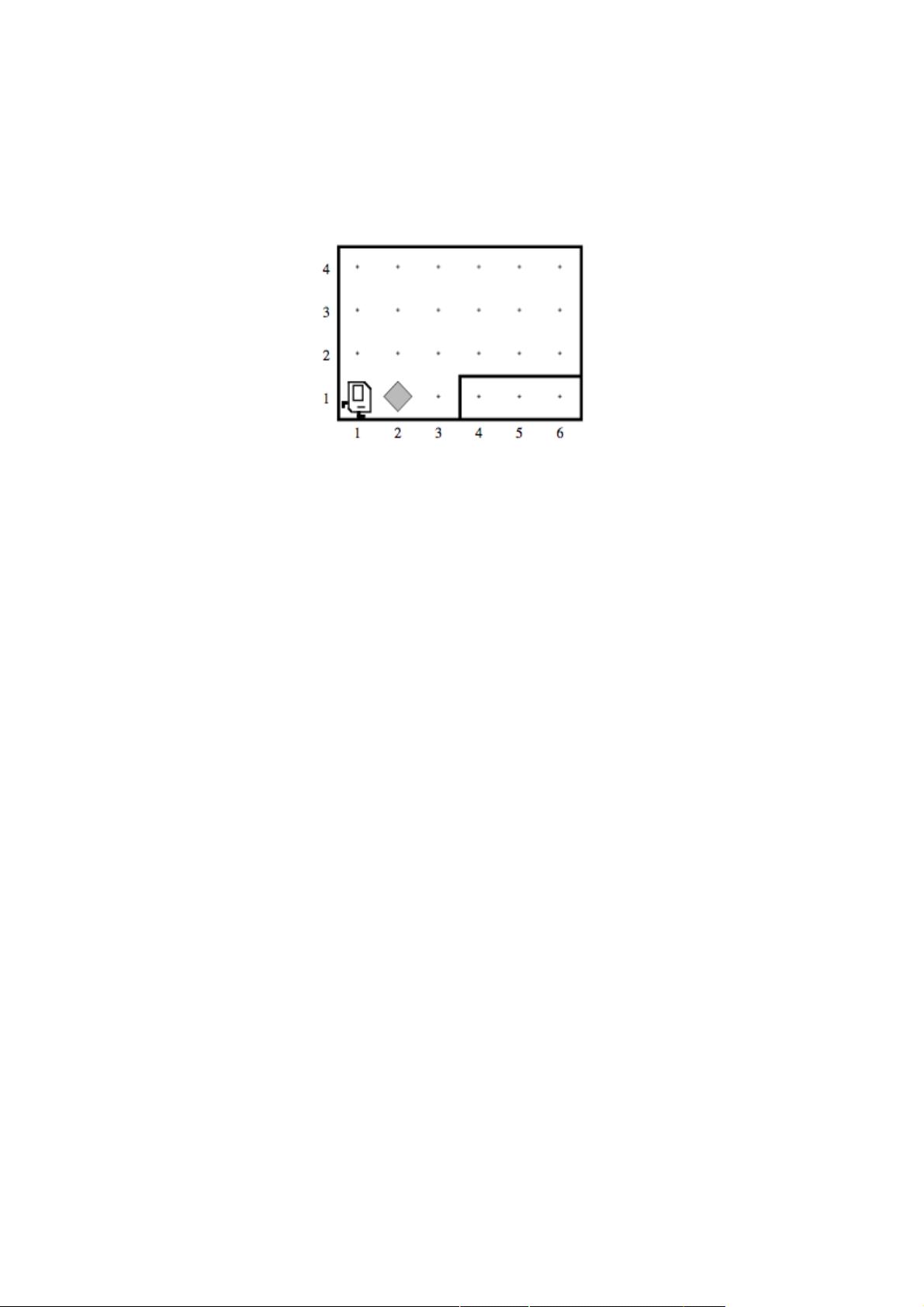
卡雷尔是啥?
卡雷尔是一个生活在非常简单的世界中的非常简单的机器人。在它的世界中,你可以通过给卡雷
尔一组命令,直接让卡雷尔执行某些任务。指定这些命令的过程称为编程。最初,卡雷尔只明白
极少数预定义的命令,但编程(学习)过程的一个重要内容,就是教卡雷尔可以扩展它的能力的
新命令。
当你谋划让卡雷尔执行某项任务的时候,你必需用非常精确的方式写出这些必需的命令,以便这
个机器人能够正确的理解你交待它做的事情。(另外)特别(注意的)是,你写的程序必须遵守
语法规则,它规定了什么样的命令和语言形式是合法的。二者合在一起,预定义的命令和语法规
则(一起)定义了卡雷尔编程语言。卡雷尔编程语言被设计的尽可能类似于 Java 语言,这样便于
顺利过渡到(Java)这门你将时刻使用的语言上。卡雷尔程序具有和 Java 程序相同的结构,也涉
及到相同的基本元素。最关键的区别是,卡雷尔的编程语言非常的小,从这个意义上讲,它只具
有非常少的命令和规则。它非常容易,例如,教授卡雷尔语言只需要几个小时,这也正是我们在
CS106A 中做的。在(课程)结束的时候,你将知道卡雷尔能做的一切事情,以及如何在一个程
序中实现它。这些细节是容易掌握的。即便如此,你会发现,(需要)解决的问题可能是极其具
挑战性的。解决问题是编程的本质;在这一学习过程中,对规则的关注是次要的。
在复杂的语言里,如 Java,有许多的细节,这些细节往往成为学习的课程的重点。当这种情况发
生时,对解决问题的更关键的东西,往往会在得到一片混乱中失去。通过从卡雷尔入手开始学习,
你可以在一开始的时候,就把精力集中在解决问题上面。而且,卡雷尔的学习鼓励想象力和创造
力,在学习过程中,你会收获不少乐趣。(这段话的意思是,要把精力集中在比语法细节更重要
的--解决问题的能力上。译者注)



剩余39页未读,继续阅读

卡雷尔
- 粉丝: 0
- 资源: 1









最新资源
- 基于labview的定时时钟实设计
- 基于labview的FM调制
- 基于labview的智能大棚温湿度控制系统
- 纯电动汽车Matlab Simulink软件模型,纯电动汽车动力性、经济性仿真模型 1.本模型基于Matlab Simulink搭建,包含:电池、电机、整车纵向动力学、控制策略、驾驶员等模块 2.模
- IBM Cognos Analytics CA Workshop Data.rar
- lv_0_20241219205459.mp4
- ggml-medium-q8-0.bin
- enc_synd_gen_fn_255.vh
- 前端图例测试代码12.20
- 《数字图像处理》课程设计-人脸识别门禁系统
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
前往页