

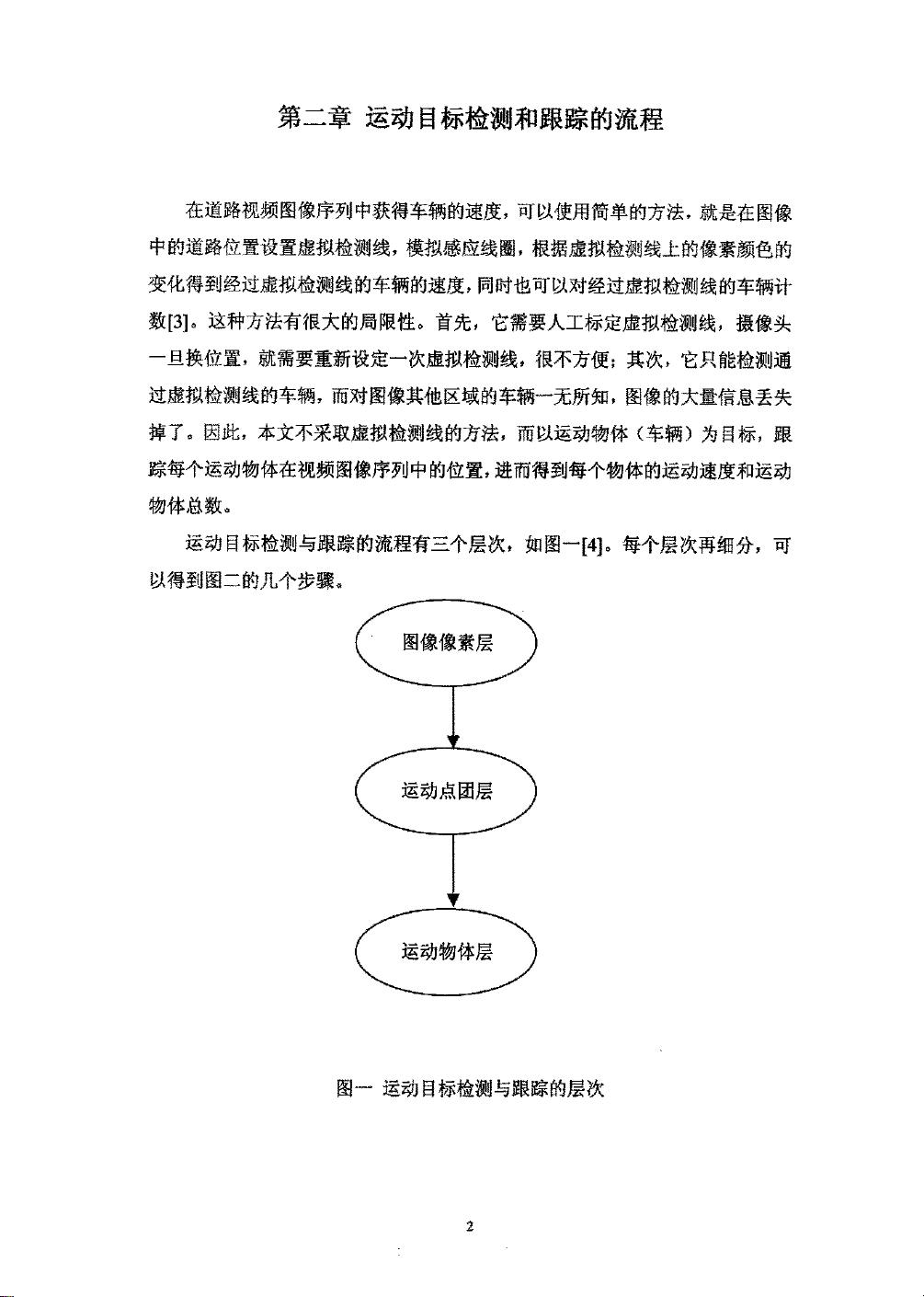
第一章弓|言
在遂路交逶控裁管瑾镶域,管瑾部门需要掌援道路上车辆静速褒、车辍静数
爆等等数搠以控制红绿灯平衡邋路车流煅、对超速和闯红灯的车辆进行处罚。早
麓,入识一般采建藏癍线圈鼹方式获褥攀辍赫速度、车辆懿数量等数攘。这秘方
法,需要在检测路段埋入感应线圈,这需蒙对道路施工,会影晌交通,严重影响
邋路寿命,莠且感应线圈设备褰易被重擞车辆压坏,维护起来又要对遂路藏工,
非常麻烦【l】。
随着计算机技术的发展,道路交通数据获取不再需要复杂的线圈设备了。只
鬻在检测路段固定摄像头,摄像头拍摄酌道路数学化视频聪缩后通道传输线路
(如光纤)传输到监控中心,擞控中心的计算机采用数字图像处理的方法将道路
交逶麴数瓣诗算密采闭。与举凝豹方法耱琵,这蕈孛方法稳'}{l了软件算法透过计
算机的强大计算能力得到我们需要的数据,而不是复杂的硬件设备(如艨应线圈)
对数摆壹接溺量。这掇大懿壤熬了方矮瞧稻灵活瞧。麴薅诖诗算疑放撬频錾缘謦
列中获得邋路交通数据,例如率辆的速度等,近年来很多人对此展开了研究。
扶视频图像序列中获褥运貔物体款数据瓣方法除了能运耀在道路交遥雏,邀
能运用于各种监控领域,例如小区防盗、银行监控镩等,用以检测和跟踪进入场
景的人或物体,应用范围菲常广泛。
本文就是研究如何让计算机从视频圈像序列中获得物体运动数据——视频
图像序列中运动物体的检测和跟踪。研究以道路交通作为实验场景,单摄像头且
疆像头固澎的情况。输入是RGB色彩空蠲豹视颓阕像滓剜,西标是实现对褫颧
图像序列中运动物体的跟踪,获得其在图像坐标下的速度。而多摄像头的情况和
摄像头罪楚翡辱搴运动魏待况,魄擎摄像爻薤摄豫头瀚定匏耩凝复杂,掰赧多豢稼
头的多个二维图像序列中如何煎构三维场景等。单摄像头且摄像头固定的情况是
爨基本的馕凌,医既本文集孛耱力磅究革摄像头量摄像头固定壤凝下黪运凄曩拣
检测和跟踪。
剩余77页未读,继续阅读
资源评论













