全连接层。
2. Region Proposal Networks。RPN网络用于生成region proposals。该层通过softmax判断
anchors属于positive或者negative,再利用bounding box regression修正anchors获得精确
的proposals。
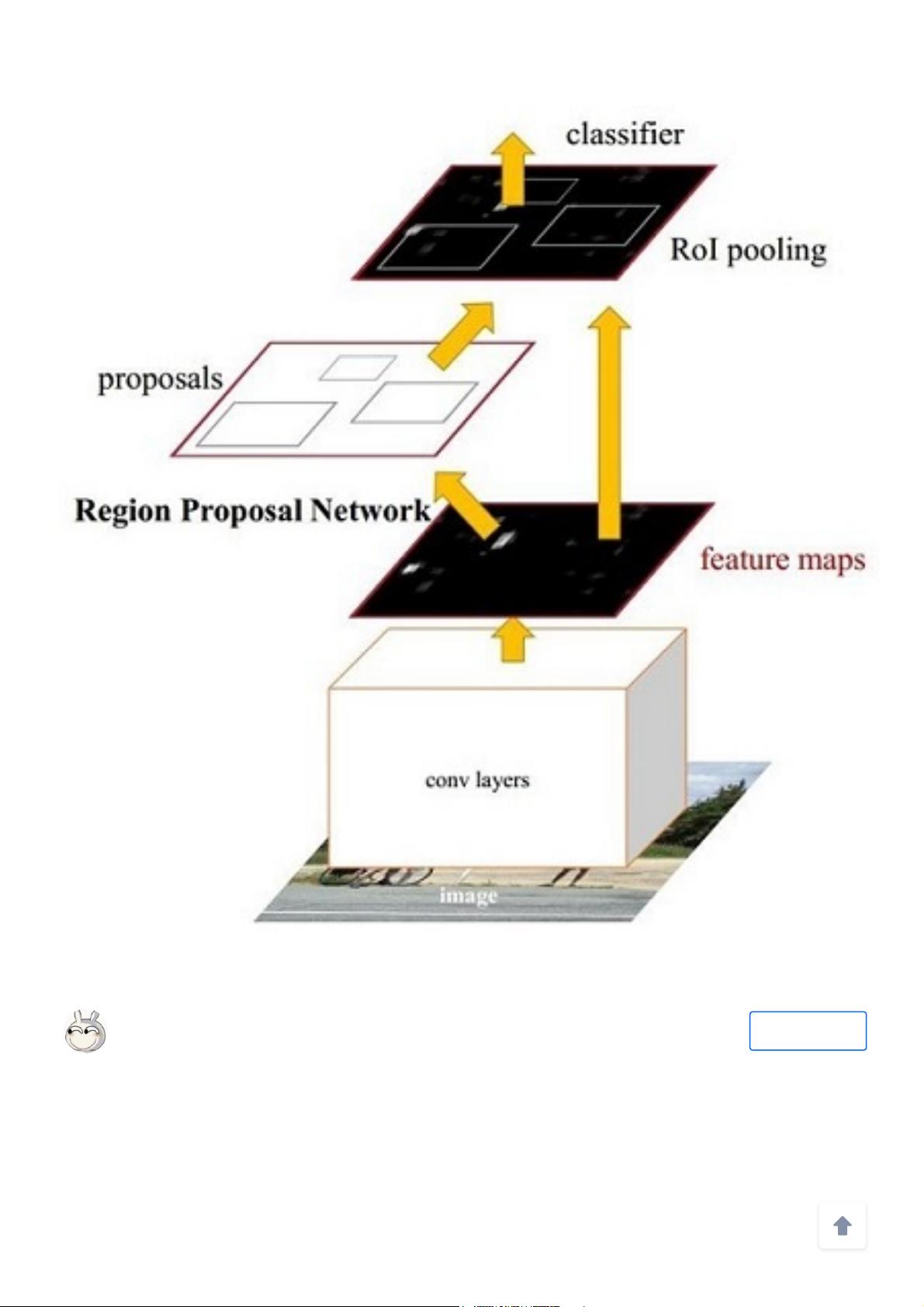
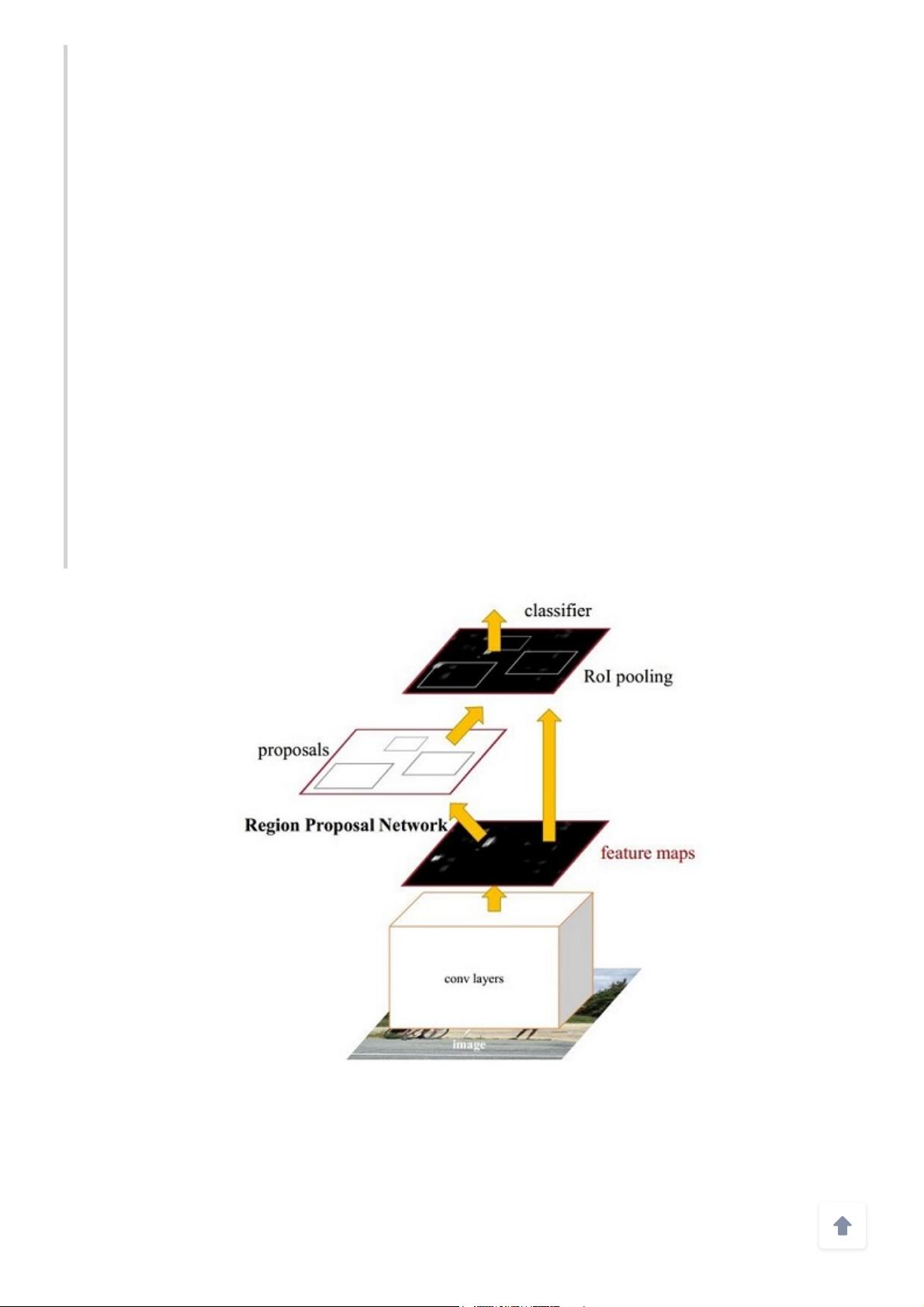
3. Roi Pooling。该层收集输入的feature maps和proposals,综合这些信息后提取proposal
feature maps,送入后续全连接层判定目标类别。
4. Classification。利用proposal feature maps计算proposal的类别,同时再次bounding box
regression获得检测框最终的精确位置。
所以本文以上述4个内容作为切入点介绍Faster R-CNN网络。
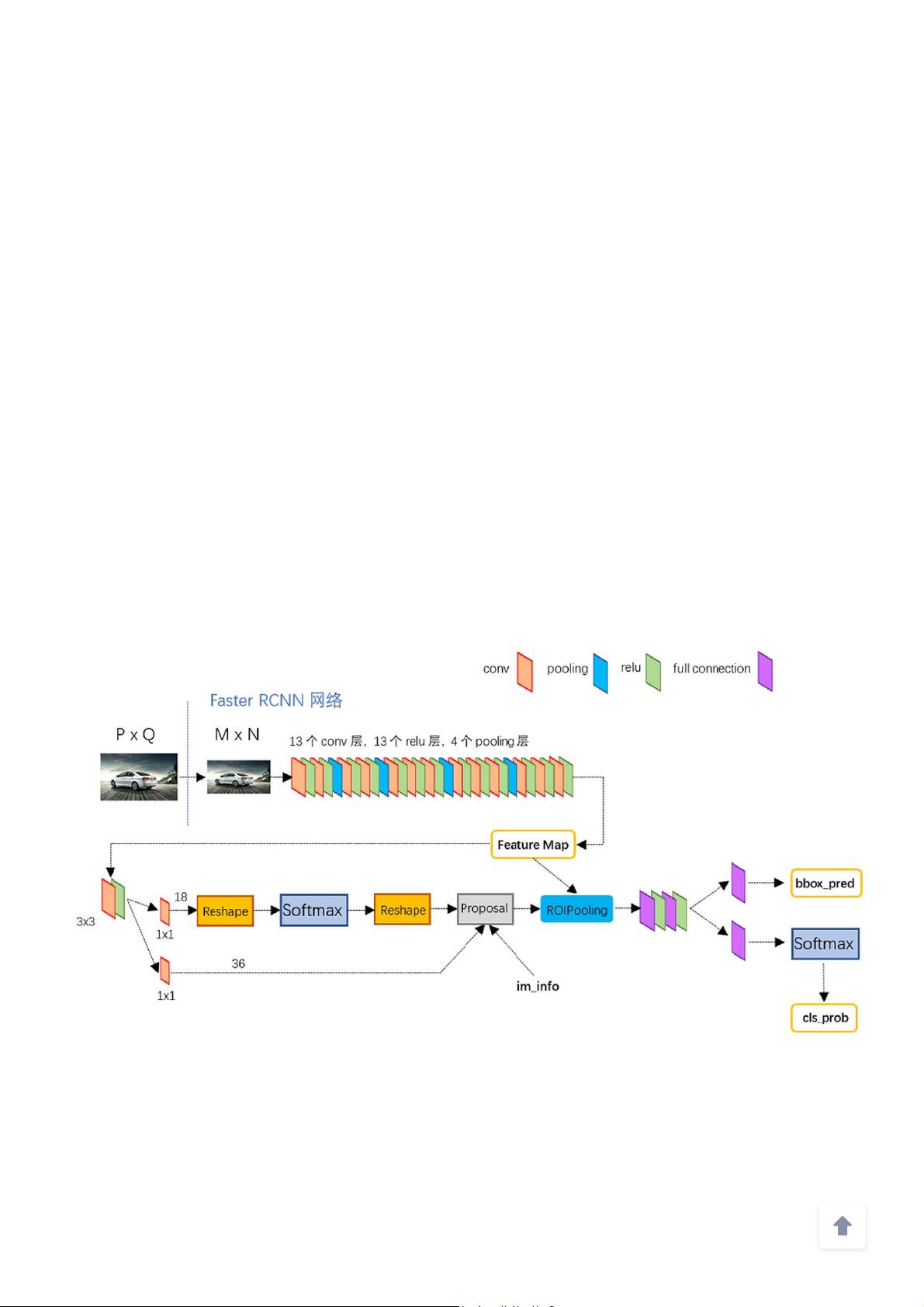
图2展示了python版本中的VGG16模型中的faster_rcnn_test.pt的网络结构,可以清晰的看到该网
络对于一副任意大小PxQ的图像:
• 首先缩放至固定大小MxN,然后将MxN图像送入网络;
• 而Conv layers中包含了13个conv层+13个relu层+4个pooling层;
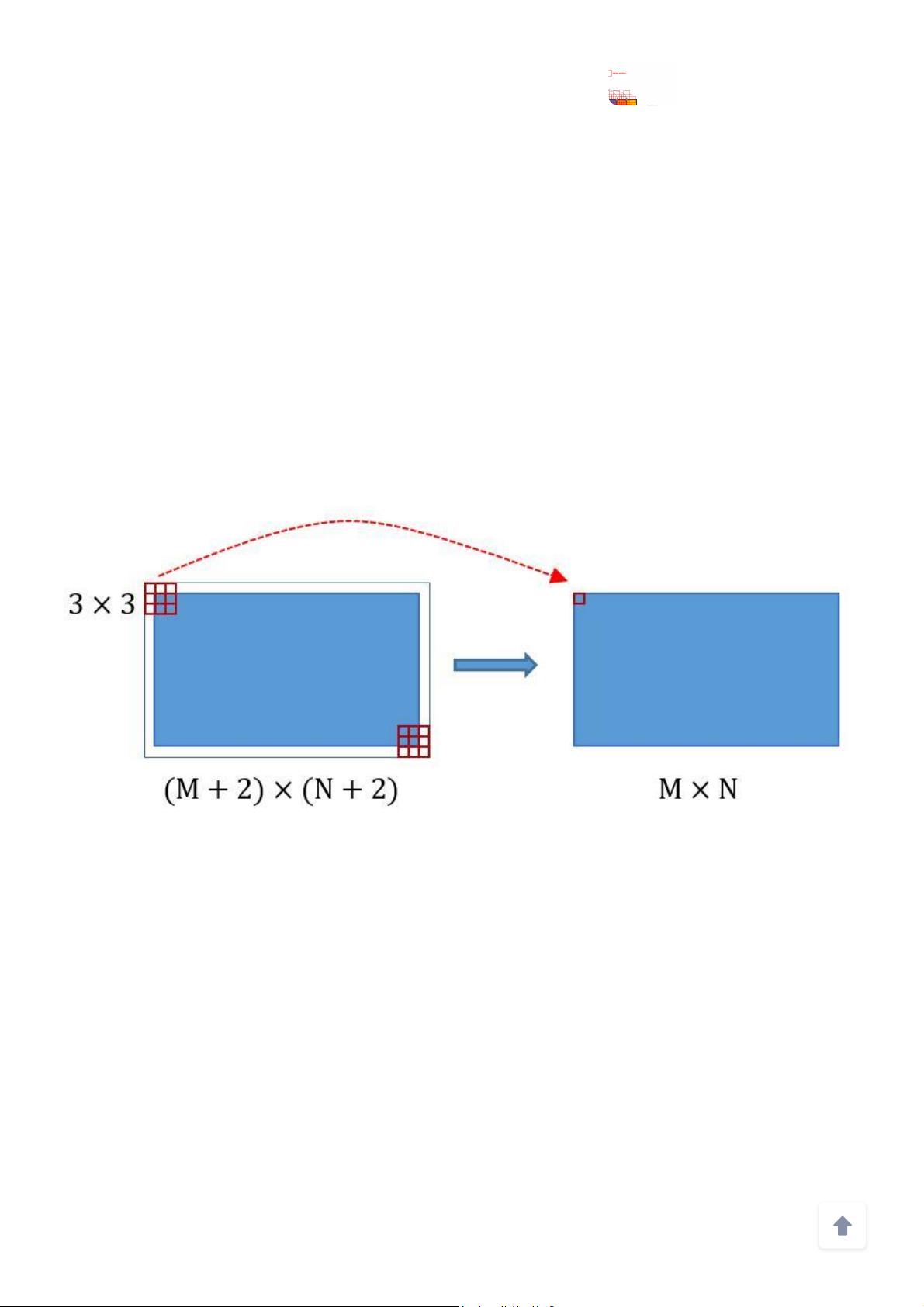
• RPN网络首先经过3x3卷积,再分别生成positive anchors和对应bounding box regression偏
移量,然后计算出proposals;
• 而Roi Pooling层则利用proposals从feature maps中提取proposal feature送入后续全连接和
softmax网络作classification(即分类proposal到底是什么object)。
图2 faster_rcnn_test.pt网络结构 (pascal_voc/VGG16/faster_rcnn_alt_opt/faster_rcnn_test.pt)
本文不会讨论任何关于R-CNN家族的历史,分析清楚最新的Faster R-CNN就够了,并不需要追溯
到那么久。实话说我也不了解R-CNN,更不关心。有空不如看看新算法。
新出炉的pytorch官方Faster RCNN代码导读:















- 1
- 2
前往页