

汽车倒车防撞系统
1 绪论
1.1 论文背景
随着社会经济的发展,交通运输业日益兴旺,汽车的数量在大副攀升。交通拥挤
状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针
对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞报警系统势在必行。
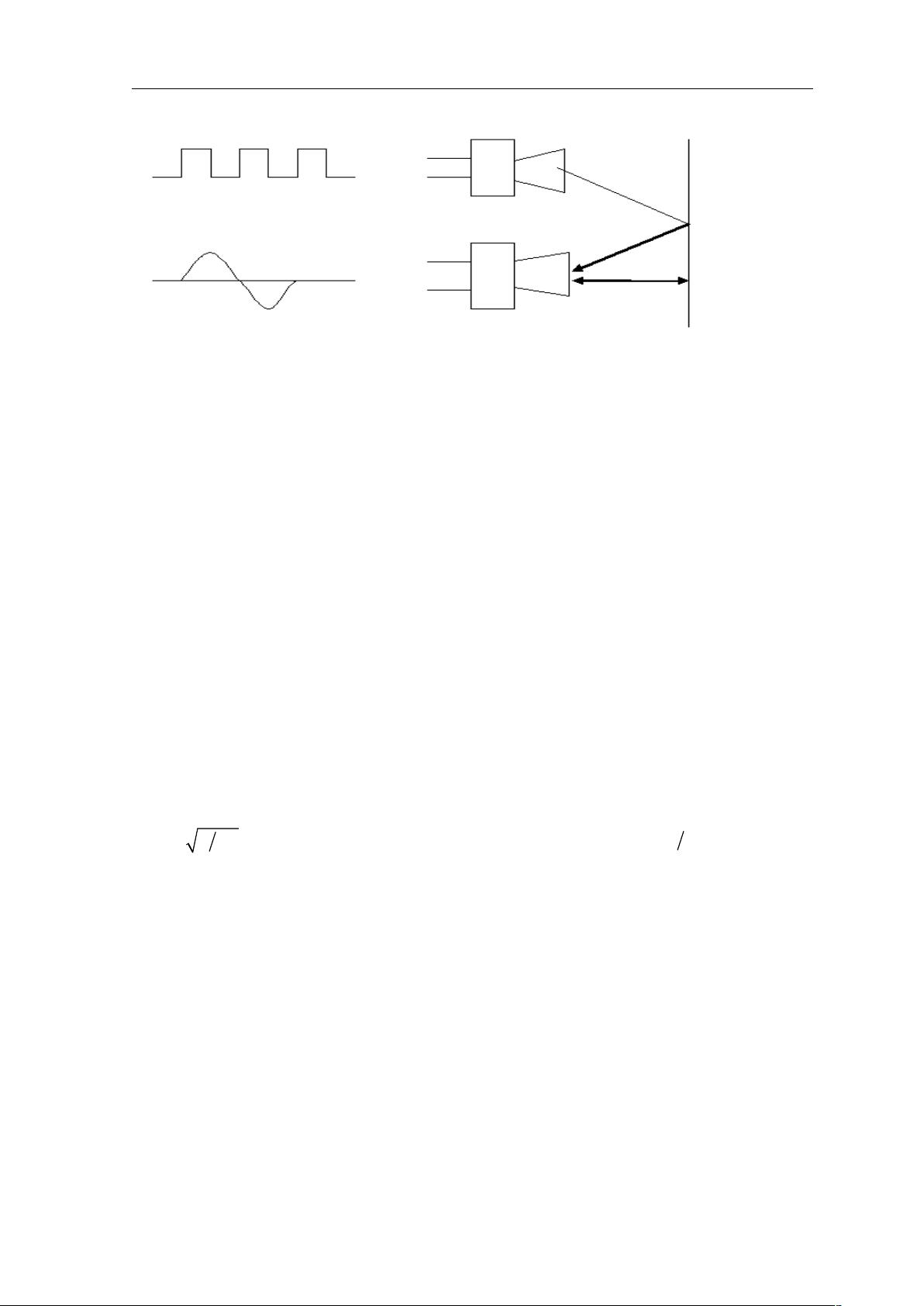
超声波作为一种特殊的声波,同样具有声波传输的基本物理特性——折射,反
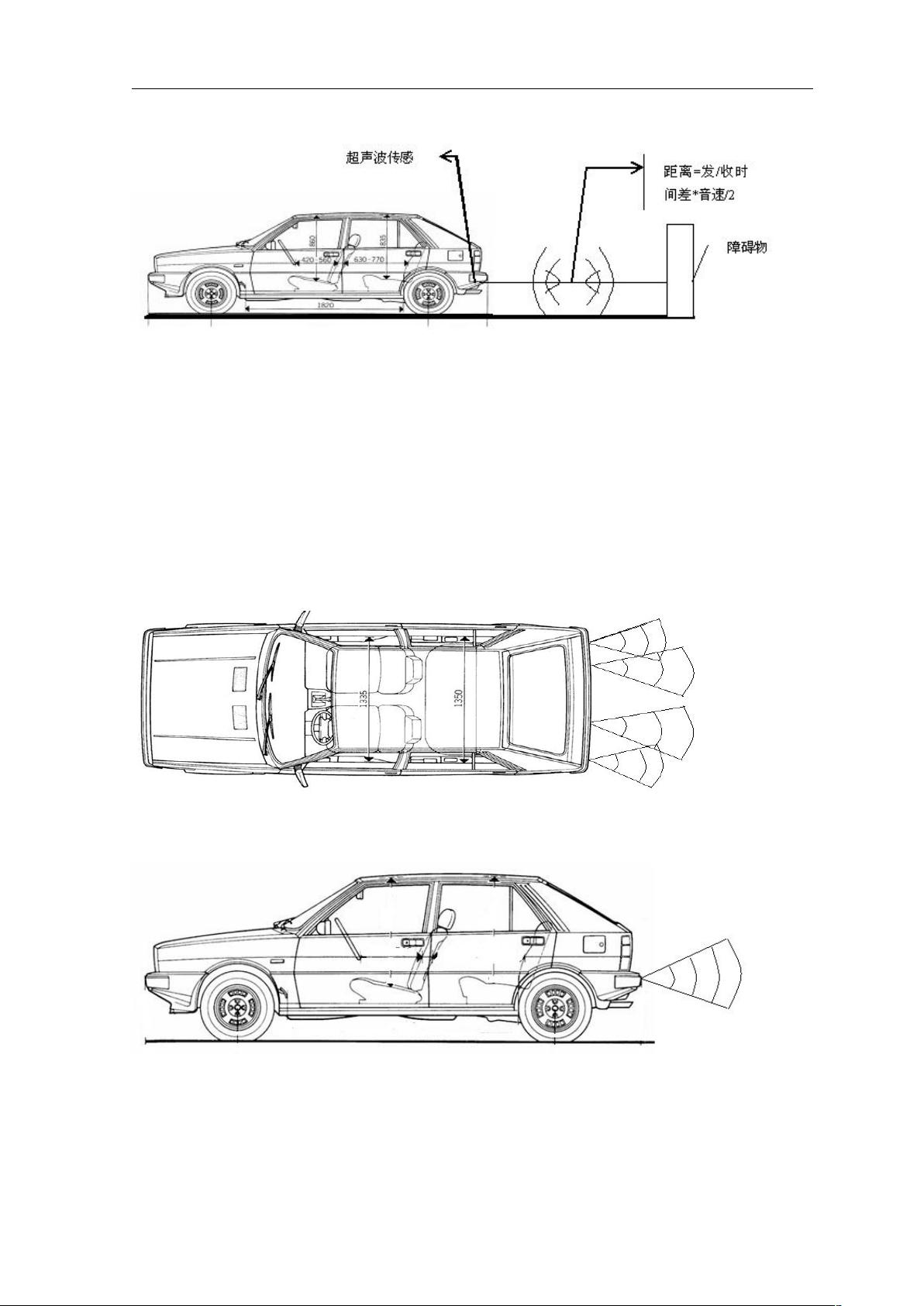
射,干涉,衍射,散射。超声波测距即是利用其反射特性,当车辆后退时,超声波
距离传感器利用超声波检测车辆后方的障碍物位置,并利用指示灯及蜂鸣器把车辆
到障碍物的距离及位置及时通知驾驶人员,起到安全的作用。
1.2 设计要求及主要功能介绍
本次设计的汽车倒车防撞系统,它是以 STC89C52 作为主控制器,用超声波模块对
距离进行距离测试,并将信号发给主控制器。用 L298 芯片驱动直流电机,执行主
控制器命令,控制小车的前进、减速、停止。LED 和蜂鸣器报告检测出汽车后方有
障碍物。
2 超声波模块的工作原理
2.1 超声波
我们知道,当物体振动时会发出声音。科学家们将每秒钟振动的次数称为声音
的频率,它的单位是赫兹。人类耳朵能听到的声波频率为 20~20,000HZ。当声
波的振动频率大于 20000HZ 或小于 20HZ 时,我们便听不见了。因此,我们把频
率高于 20000HZ 的声波称为“超声波”。超声波广泛地应用在多种技术中。超声波
有两个特点,一个是能量大,一个是沿直线传播。由于超声波也是一种声波,超声
波在媒质中传播的速度和媒质的特性有关。
声波是物体机械振动状态(或能量)的传播形式。所谓振动是指物质的质点在
其平衡位置附近进行的往返运动。超声和可闻声本质上是一致的,它们的共同点都
1


剩余43页未读,继续阅读
资源评论


anshaohua22
- 粉丝: 6
- 资源: 4









最新资源
- 工业互联网题目及答案多选
- (C++)MFC绘图应用,面对对象编程与设计期末作业.zip
- 西门子200smart PLC 医药洁净室空调箱程序 温湿度串级PID 模拟结构体变量 用200smart来作为控制器 在刚开始做的时候也对200smart的控制功能也有担心,毕竟不想1500功能强
- 安全工作巡查、检查制度.docx
- 八项规定实施细则精神的办法(试行).docx
- 财务交接清单格式.docx
- 报销业务培训PPT.pptx
- 村委会招标的会议记录.docx
- 大学生安全知识之防交通安全篇.docx
- 抖音各级灯牌需要多少亲密度表.docx
- 5g+工业互联网试题及答案
- 多灾种叠加应急预案.docx
- 分析检验技术专业人才培养方案.docx
- 高校“职工互助一日捐”活动实施细则.docx
- 工会女职工劳动保护特别规定.docx
- 工会扎实开展“救助困难职工一日捐”活动实施方案.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


