

2011 Lab for SoC Design Principles
Teacher: Prof. Nie Xiaoning - 1 - Spring 2011, Suzhou
TA: Wang Chao, Zhai Jianfang University of Science and Technology of China
Module 1
Questions:
Configuration:
Compiler & Assembler:
1. What does ATPCS stand for? What are the goals of ATPCS?
ATPCS is the short of ARM-Thumb Procedure Call Standard. The goals are to make the base rules,
obeyed by the call between ARM instruction set and Thumb instruction.
More detailed ones:
The goals of the ATPCS are to:
Support Thumb-state and ARM-state equally.
Support inter-working between Thumb-state and ARM-state.
Favor:
Small code-size.
Functionality appropriate to embedded applications.
High performance.
And where these aims conflict significantly, to standardize variants covering different priorities among
them.
Clearly distinguish between mandatory requirements and implementation discretion.
Support alternative floating-point architectures and instruction sets.
Be binary compatible with:
The most commonly used variant of the previous APCS.
The most commonly used variant of the previous TPCS
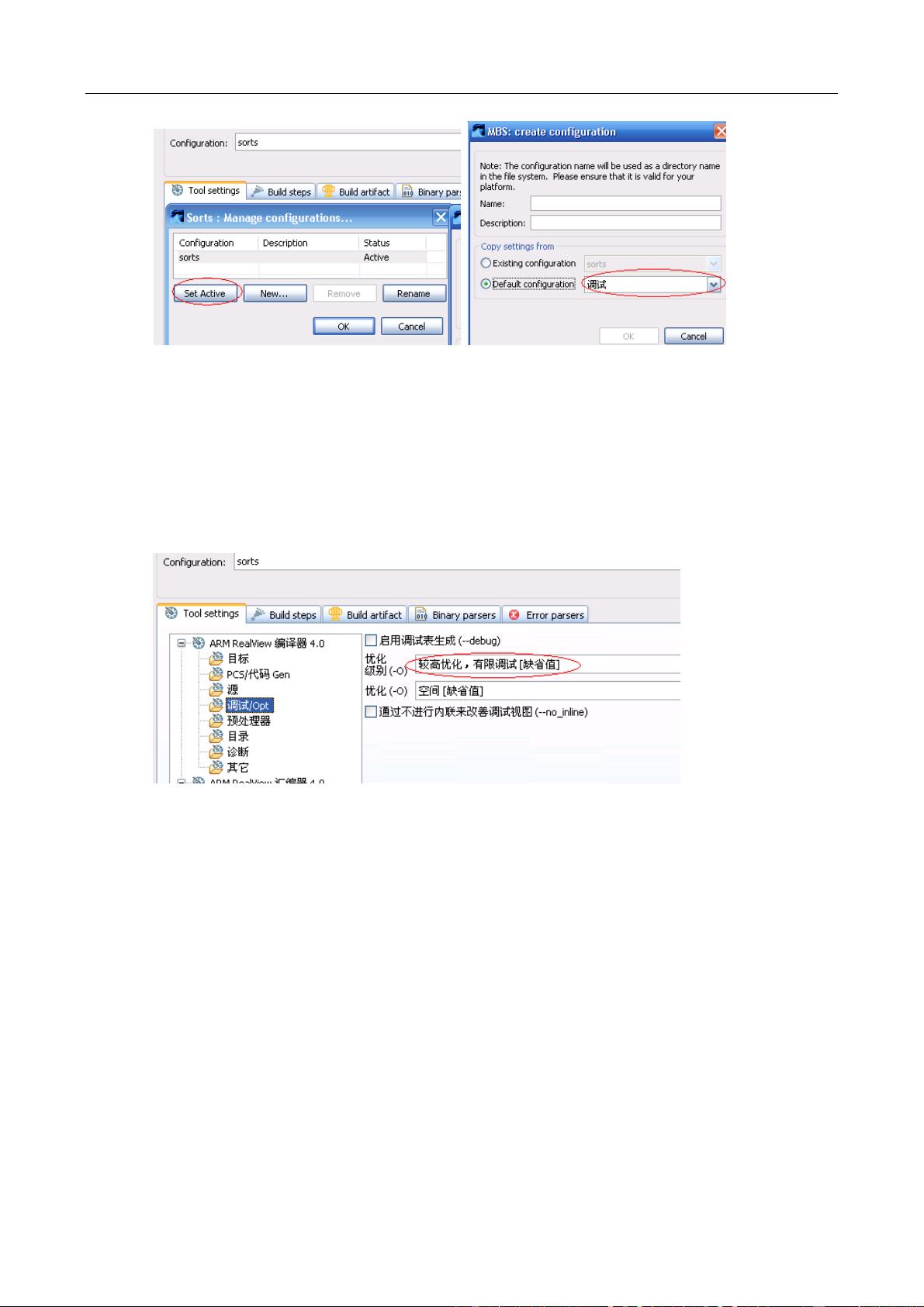
2. What is the different between DEBUG and Release version? How to switch them?
Debug version is used for programmers to debug the program. It consists of debug information, and no
optimizing option is used. Meanwhile, Release version uses the optimization options, both in code size
and run time, especially for users.
The key issue between debug and release version if the different compiling options. By using
customizing options, we can switch between debug and release version.
To change them is ARM REALVIEW WORKBENCH IDE, in Properties for projects->C/C++ Build
Settings->Manage Configurations-> Set active to change the version, and also New to create new
configuration.
剩余13页未读,继续阅读
资源评论



Hector.F
- 粉丝: 8
- 资源: 2









最新资源
- zblog站群:zblog seo站群高收录排名全地域霸屏
- 【安卓毕业设计】数独联网对战APP源码(完整前后端+mysql+说明文档).zip
- 【安卓毕业设计】Android天气小作业源码(完整前后端+mysql+说明文档).zip
- 【安卓毕业设计】群养猪生长状态远程监测源码(完整前后端+mysql+说明文档).zip
- 【安卓毕业设计】奶牛管理新加功能源码(完整前后端+mysql+说明文档).zip
- C#.NET公墓陵园管理系统源码数据库 SQL2008源码类型 WebForm
- 作业这是作业文件这是作业
- 4353_135543959.html
- C#物联订单仓储综合管理系统源码 物联综合管理系统源码数据库 SQL2008源码类型 WebForm
- 2024年最新敏感词库(7万余条)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


