

题目:uc/os 下的调度算法改造,提供非抢占的基于时间片
轮转调度。
1. 需求分析
随着移动通信、信息家电以及工业控制等领域的快速发展,嵌入式软件产
业迎来了极佳的发展时机。强劲的市场需求带来了研发的快速增长,越来越多
的软件公司投入到嵌入式产品的研发中。但另一方面,大部分软件公司却缺乏
嵌入式操作系统这个嵌入式产品的核心技术,无法提供给各种应用多任务等现
代操作系统所必备的功能,极大地限制了产品的性能和发展。μC/OS-II 具有源
码公开,商业授权费极低等特点,成为嵌入式产品开发的一种选择。
μC/OS-II 在设计时强调实时性。它采用单一的基于优先级的抢先式调度算
法,有效地保证了实时性的要求。在各种嵌入式操作系统中,其任务切换带来
的时延窗口很小。非常适合强实时性的任务要求,但是对于大部分周期性和实
时性要求不高的任务来说,μC/OS-II 还存在一些不足:缺乏时间片调度,低优
先级的任务很难得到执行。μC/OS-II 不支持时间片调度,优先级高的任务如果
不主动放弃 CPU,低优先级任务永远都不可能运行。这对于那些分别编写,但
是可能同时运行的任务来说,只能通过任务之间的同步等动作来完成交替运行。
这不但增加了编程难度,而且破坏了模块的独立性。
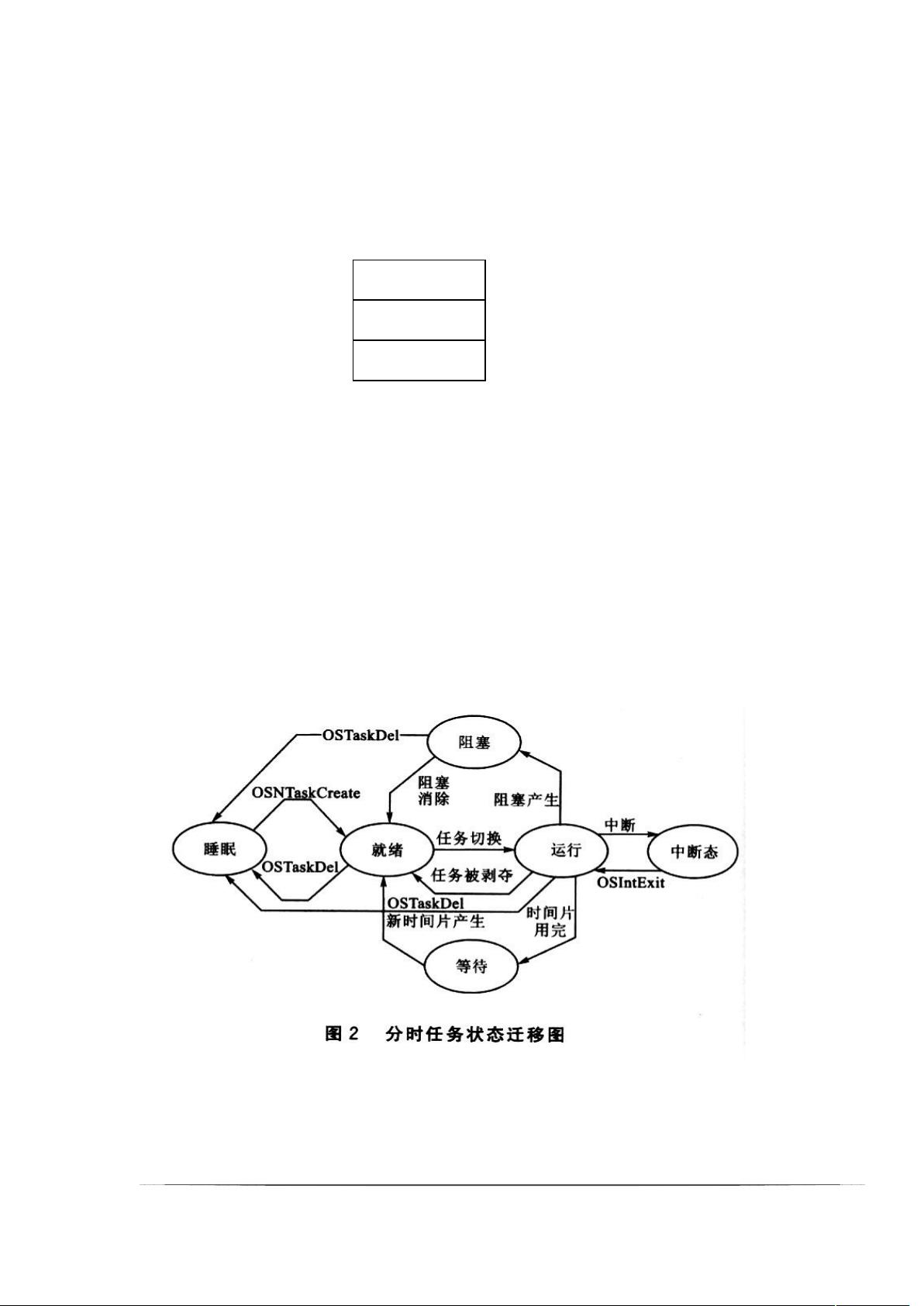
如果希望能在包括数目庞大的非实时应用的产品中利用 μC/OS-II,则必须
对它作出扩充,在保留实时任务支持的前提下,增添时间片调度。
1
剩余8页未读,继续阅读
资源评论

 xkh3581417212013-01-05文档内容清晰,改动地方少,能达到目的,同一优先级只能有一个任务,推荐。
xkh3581417212013-01-05文档内容清晰,改动地方少,能达到目的,同一优先级只能有一个任务,推荐。

alexandertk
- 粉丝: 1
- 资源: 5









最新资源
- 白色扁平风格的银行业务企业网站源码下载.zip
- 白色扁平风格的新闻资讯娱乐整站网站源码下载.zip
- 白色扁平风格的优雅时尚英文整站网站源码下载.zip
- 白色扁平风格的阅读书店整站网站模板.zip
- 白色扁平风格的原创素材类企业网站源码下载.zip
- 白色扁平化的国际物流运输企业网站模板下载.zip
- 白色扁平化的绿色花艺花店企业网站模板下载.zip
- 白色扁平化的牛排汉堡西餐厅企业网站模板.zip
- 白色扁平化的网络博客整站网站模板下载.zip
- 白色扁平化风格的城市规划设计企业网站模板.rar
- 白色扁平化的在线课堂补习班模板下载.zip
- 白色扁平化风格的法律律师在线咨询企业网站模板.zip
- 白色扁平化风格的灯饰灯具销售企业网站模板.zip
- 白色扁平化风格的房地产开发公司模板下载.zip
- 白色扁平化风格的个人摄影博客模板下载.zip
- 白色扁平化风格的航空公司官网企业网站模板.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


