AN5325_ 基于STM32CubeG4软件包开始使用CORDIC加速器的应用手册.pdf
需积分: 44 46 浏览量
2020-06-13
15:25:33
上传
评论
收藏 406KB PDF 举报

Introduction
This document applies to STM32CubeG4 MCU Package, for use with STM32G4 Series microcontrollers.
The CORDIC is a hardware accelerator designed to speed up the calculation of certain mathematical functions, notably
trigonometric and hyperbolic, compared to a software implementation.
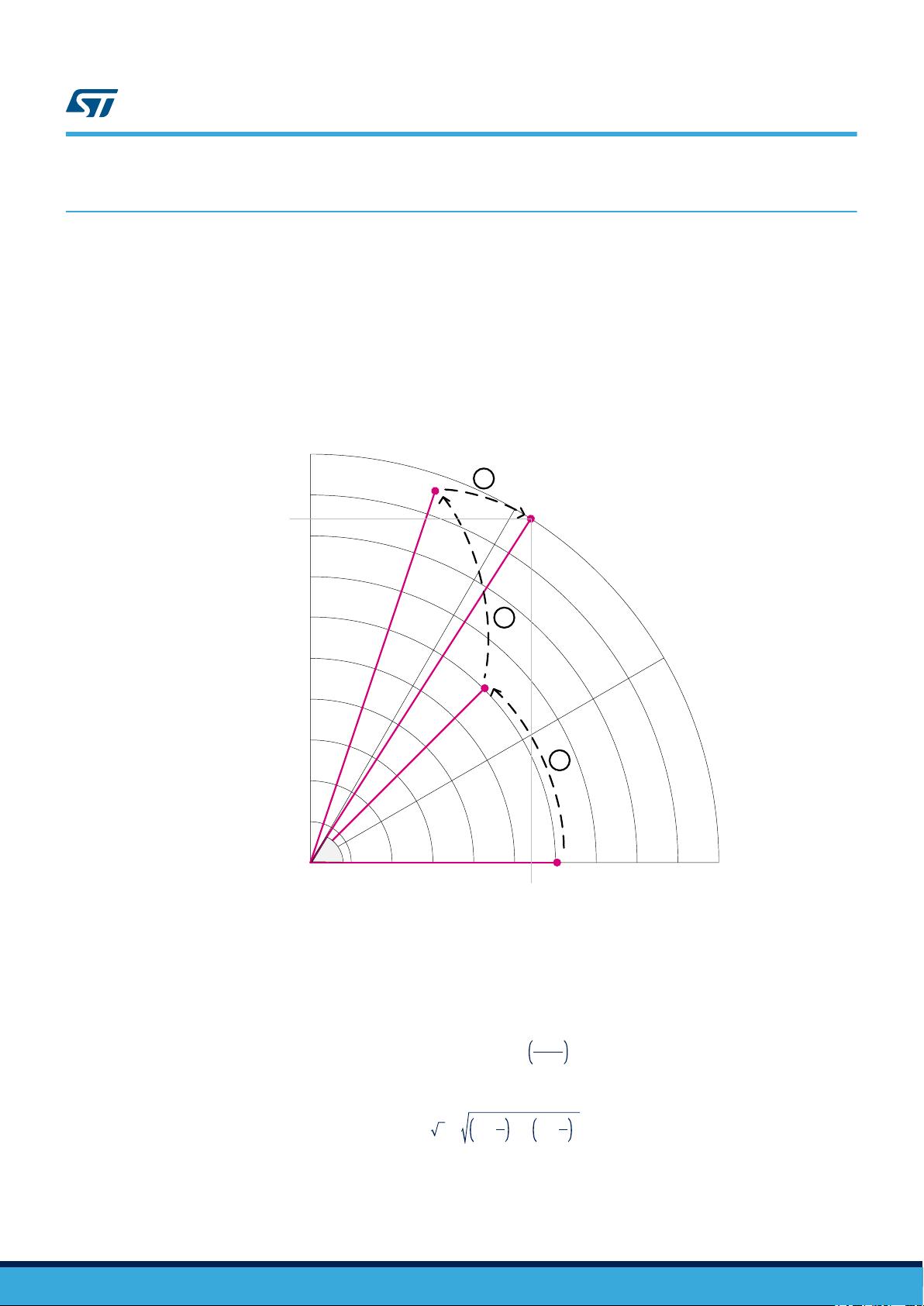
The accelerator is particularly useful in motor control and related applications, where algorithms require frequent and rapid
conversions between rectangular (x, y) and angular (amplitude, phase) co-ordinates.
This application note describes how the CORDIC accelerator works on STM32G4 Series microcontrollers, its capabilities and
limitations, and evaluates the speed of execution for certain calculations compared with equivalent software implementations.
The example code to accompany this application note is included in the STM32CubeG4 MCU Package available on
www.st.com. The examples run on the NUCLEO-G474RE board.
Getting started with the CORDIC accelerator using STM32CubeG4 MCU Package
AN5325
Application note
AN5325 - Rev 1 - May 2019
For further information contact your local STMicroelectronics sales office.
www.st.com


剩余19页未读,继续阅读
资源评论


adu00
- 粉丝: 0
- 资源: 33









最新资源
- Linux常用命令及用法说明
- 基于Matlab的FFT频谱分析及IIR数字滤波器设计
- AutoCAD高压低压电气开关柜设备接线图图纸
- AutoCAD电气图纸建筑电气开关柜常用cad图纸
- 使用ASP.NET Core和Entity Framework Core来构建一个基本的进销存系统.rar
- 深度学习经典数据集+FER2013面部表情识别+附带使用方法的python代码
- Python中,要实现连接多个相机并识别多个二维码.rar
- 使用FFT算法对一个信号进行分析.rar
- 171cms游戏应用下载系统源码.zip
- 基于jsp+servlet+mysql蛋糕甜品店购物网站源码+数据库(期末大作业).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


