







190183
基于端到端深度学习的
自动驾驶系统
设计说明书

目录:
一、项目摘要
二、项目背景
三、项目运行环境配置
四、数据采集
五、核心技术
六、模型训练
七、模型运行整体运行流程
八、项目文件介绍
九、运行效果截图
十、测试项目
十一、未来展望

一、项目摘要
自动驾驶(Self-driving),泛指协助或代替人类驾驶汽车的技术。自动驾驶又称无
人驾驶、电脑驾驶或轮式移动机器人,是一种通过电脑系统实现无人驾驶的技术。经过
20 世纪末到本世纪初的数十年发展,自动驾驶技术已日渐走向实用,现今的自动驾驶多
用雷达,激光测距仪,摄像头来实现,而我们则在此基础上另辟蹊径,使用纯视觉系统
来达成自动驾驶,基于此目的本项目利用卷积神经网络和 tensorflow 高阶 API 训练出一
个可以识别路上车辆等物体,以及避让,还能根据路况来自动变速的基础自动驾驶系统。
二、项目背景
现今的自动驾驶技术大多是是基于雷达传感器、摄像头等技术,再辅以智能算法,
在最短时间内计算行驶路线、躲避障碍物。计算机之于人的优势在于,一方面计算机对
于距离的把控和计算能力更为强大,更重要的是可以避免人为的操作失误而带来的交通
事故。与此同时自动驾驶让开车之人解放了双手,赋予他们更多的时间在车上去做其他
的事情。
自动驾驶在以汽车为职业的工作中优势极为明显,例如公交车和长途货车,在此类
时间跨度长,路途较为固定和突发事件较少的行程中,自动驾驶系统可以发挥其最大优
势,它可以辅助司机节省体力,并且在减少事故的同时更好的完成行驶任务。
然而常用的自动驾驶系统较为复杂,摄像头,雷达,激光测距仪,虽然这些设备能够
保障系统的精确,但是在成本上居高不下,同时各种系统的融合容易导致可靠性不高和
优化问题,故我们运用纯视觉自动驾驶系统在路面安全的前提下最大程度的减少成本,
并提高系统稳定性。

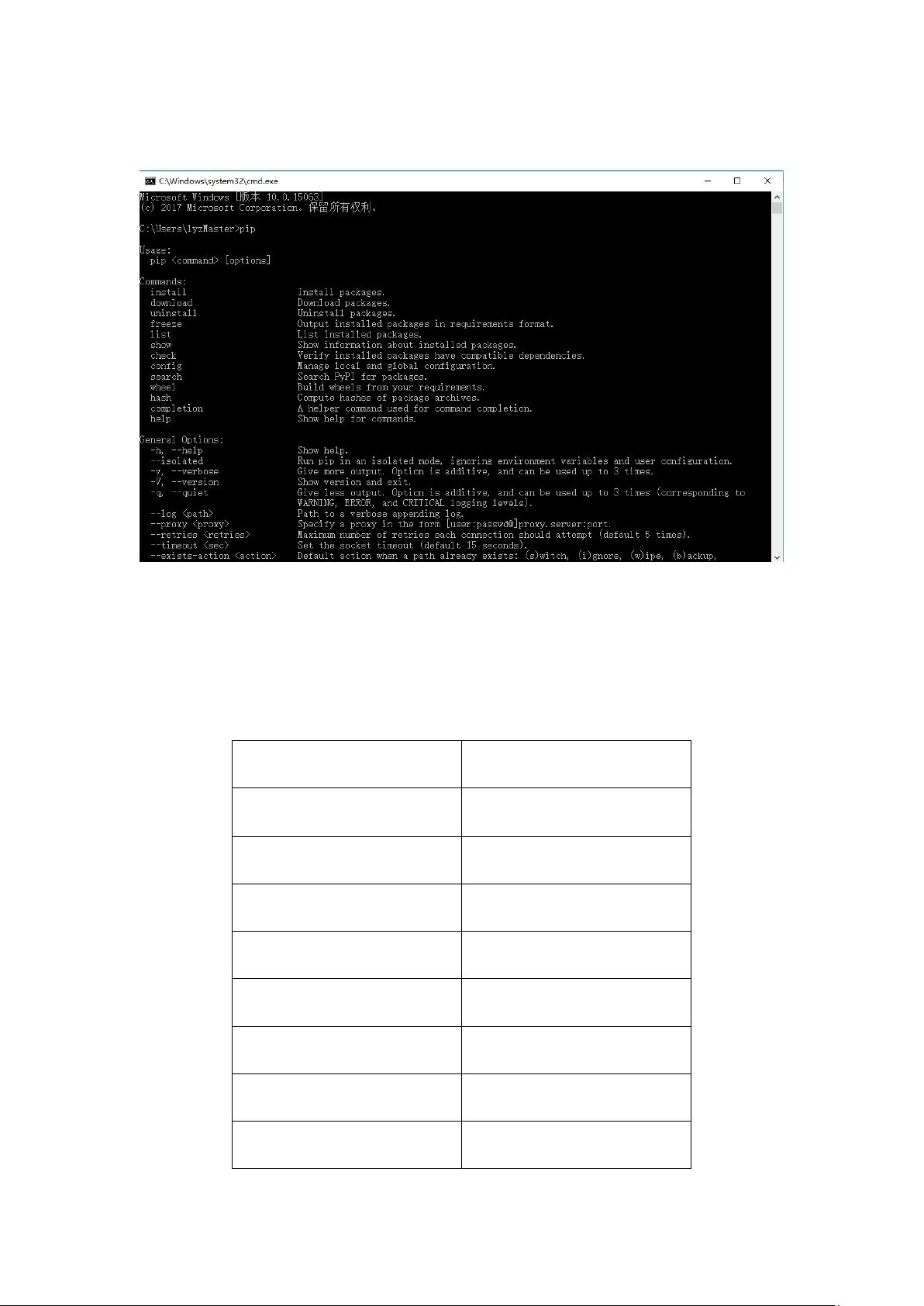
此时会弹出命令行画面。输入“pip”并点击回车,若出现以下画面,则说明 pip 安装成功。
2.安装所需 pip 包
我们项目中用 tensorflow 作为深度学习算法框架,以及使用 opencv 作为图像处理的主
力框架,PIL 作为图像处理的辅助框架。下列包是我们项目用到的第三方 python 库。
包名
版本
Numpy
1.16.2
Tensorflow-gpu
1.12.0
Keras
2.2.4
OpenCV-python
3.4.5.20
Pillow
5.4.1
Requests
2.21.0
Tqdm
4.31.1
Scipy
1.2.1













