Real-time Convolutional Neural Networks for
Emotion and Gender Classification
Octavio Arriaga
Hochschule Bonn-Rhein-Sieg
Sankt Augustin Germany
Email: octavio.arriaga@smail.inf.h-brs.de
Paul G. Pl
¨
oger
Hochschule Bonn-Rhein-Sieg
Sankt Augustin Germany
Email: paul.ploeger@h-brs.de
Matias Valdenegro
Heriot-Watt University
Edinburgh, UK
Email: m.valdenegro@hw.ac.uk
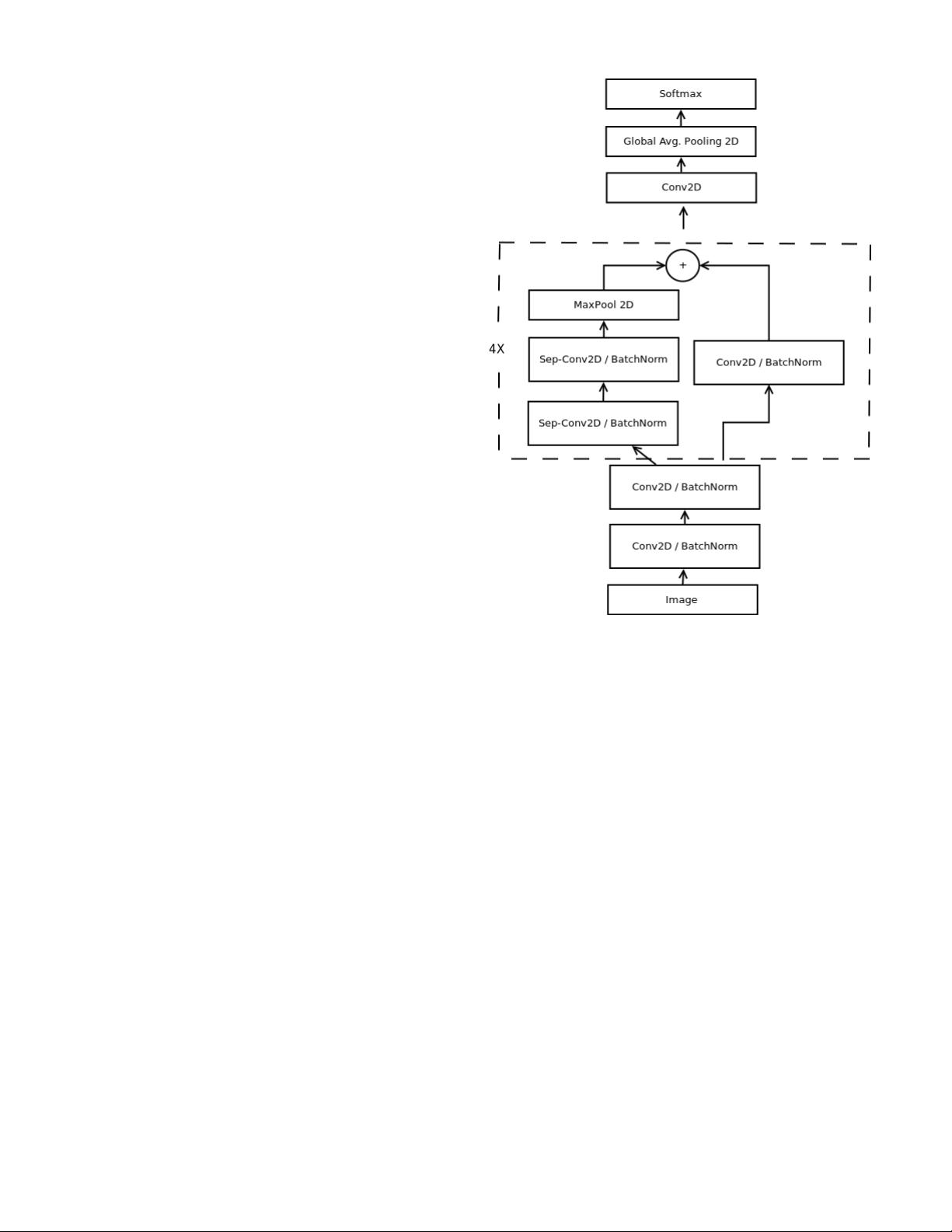
Abstract—In this paper we propose an implement a general
convolutional neural network (CNN) building framework for
designing real-time CNNs. We validate our models by creat-
ing a real-time vision system which accomplishes the tasks of
face detection, gender classification and emotion classification
simultaneously in one blended step using our proposed CNN
architecture. After presenting the details of the training pro-
cedure setup we proceed to evaluate on standard benchmark
sets. We report accuracies of 96% in the IMDB gender dataset
and 66% in the FER-2013 emotion dataset. Along with this we
also introduced the very recent real-time enabled guided back-
propagation visualization technique. Guided back-propagation
uncovers the dynamics of the weight changes and evaluates
the learned features. We argue that the careful implementation
of modern CNN architectures, the use of the current regu-
larization methods and the visualization of previously hidden
features are necessary in order to reduce the gap between slow
performances and real-time architectures. Our system has been
validated by its deployment on a Care-O-bot 3 robot used during
RoboCup@Home competitions. All our code, demos and pre-
trained architectures have been released under an open-source
license in our public repository.
I. INTRODUCTION
The success of service robotics decisively depends on a
smooth robot to user interaction. Thus, a robot should be
able to extract information just from the face of its user,
e.g. identify the emotional state or deduce gender. Interpret-
ing correctly any of these elements using machine learning
(ML) techniques has proven to be complicated due the high
variability of the samples within each task [4]. This leads to
models with millions of parameters trained under thousands of
samples [3]. Furthermore, the human accuracy for classifying
an image of a face in one of 7 different emotions is 65% ±
5% [4]. One can observe the difficulty of this task by trying
to manually classify the FER-2013 dataset images in Figure
1 within the following classes {“angry”, “disgust”, “fear”,
“happy”, “sad”, “surprise”, “neutral”}.
In spite of these difficulties, robot platforms oriented to
attend and solve household tasks require facial expressions
systems that are robust and computationally efficient. More-
over, the state-of-the-art methods in image-related tasks such
as image classification [1] and object detection are all based on
Convolutional Neural Networks (CNNs). These tasks require
CNN architectures with millions of parameters; therefore,
their deployment in robot platforms and real-time systems
Fig. 1: Samples of the FER-2013 emotion dataset [4].
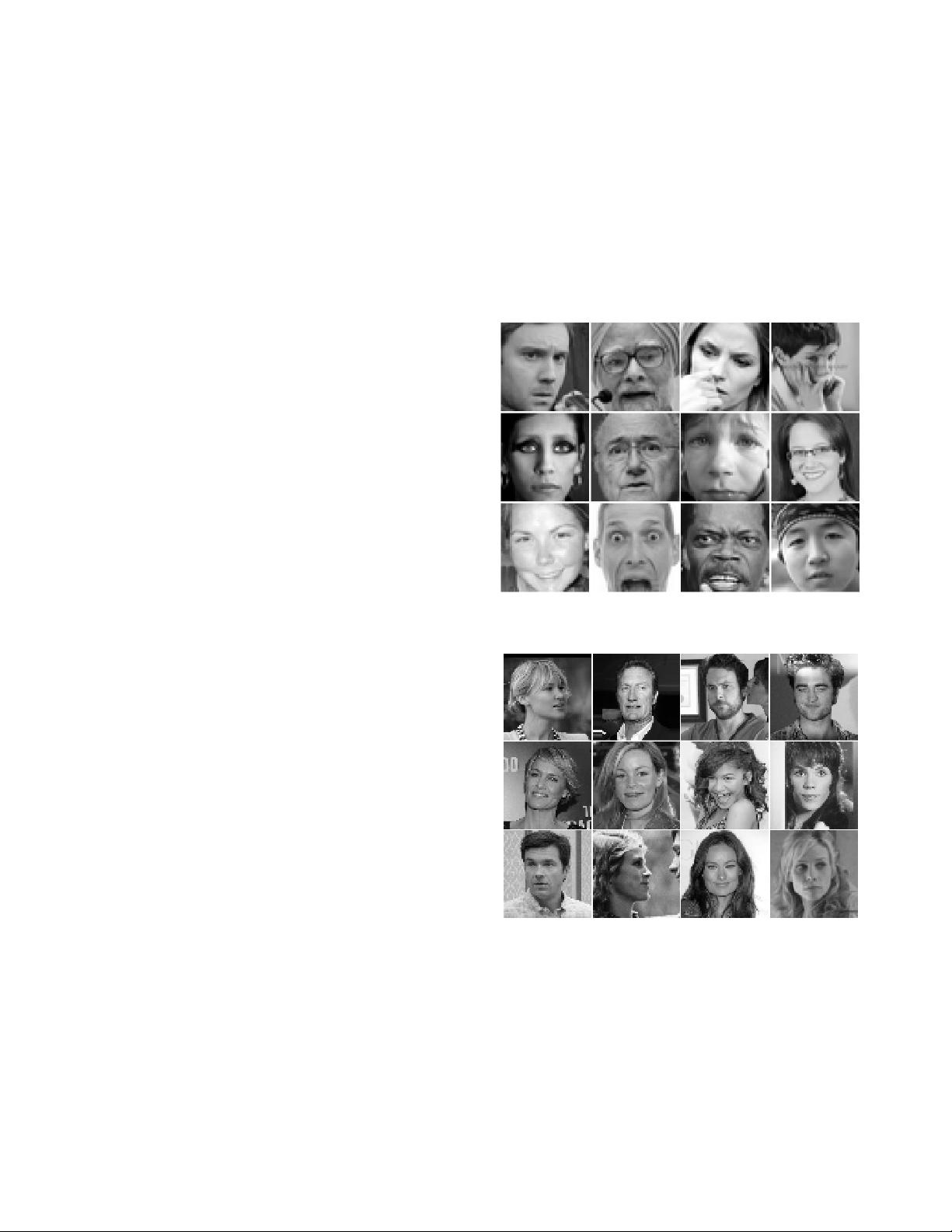
Fig. 2: Samples of the IMDB dataset [9].
becomes unfeasible. In this paper we propose an implement
a general CNN building framework for designing real-time
CNNs. The implementations have been validated in a real-time
facial expression system that provides face-detection, gender
classification and that achieves human-level performance when
classifying emotions. This system has been deployed in a
care-O-bot 3 robot, and has been extended for general robot