

SMP2 Developments in EuroSim
Robert de Vries
(1)
, Jeroen Moelands
(2)
(1)
Dutch Space B.V.
Mendelweg 30
2333 CS Leiden
The Netherlands
r.de.vries@dutchspace.nl
(2)
National Aerospace Laboratory NLR
Anthony Fokkerweg 2
1059 CM Amsterdam
The Netherlands
moelands@nlr.nl
INTRODUCTION
The Simulation Model Portability (SMP) standard is ESA’s standard for the interface between simulation models and
simulator infrastructures. The purpose of the standard is to promote portability of models among different simulation
environments and operating systems, and to promote the reuse of simulation models. SMP1 [1], the first version of the
standard, is still supported by EuroSim.
SMP2 [2] is the successor of SMP1. SMP2 is a complete revision of the standard, adopting state-of-the-art techniques
like component-based design and model driven architecture, and has a much wider impact on model and simulator
development than its predecessor. The way of working with this standard and its complexity demand tools for
specification, development, and integration of SMP2 models. EuroSim incorporates a set of tools to accomplish these
tasks.
A further iteration of the SMP standard is currently in the final draft stage as European Cooperation for Space
Standardization (ECSS) standard E-40-07. The EuroSim consortium has been involved in the process of specification of
the draft ECSS standard, like it was in SMP1 and SMP2 specification.
The simulation modelling platform (SMP) is a new standard invented from scratch. It needs to be tested in the field on a
real test bench. The EuroSim simulation infrastructure needs to be updated to comply with this standard. It can then be
used to verify that the new standard is suitable for the most demanding applications.
EUROSIM
EuroSim is a proven platform that contains a set of integrated tools to support all phases of a real-time simulation
project [3]. Model code is imported into the EuroSim environment using the Model Editor. Model code is scheduled
with the Schedule Editor. Simulators are executed using the Simulation Controller. These are just some key examples of
the dozens of tools that are available. Commonly used functionality of EuroSim is made available through user-friendly
graphical user interfaces. Most of EuroSim’s customers start modeling in MATLAB/Simulink. NLR’s tool MOSAIC
(Model Oriented Software Automatic Interface Converter) [4] allows users to automatically transfer
MATLAB/Simulink models to the EuroSim environment.
EUROSIM SMP2 IMPLEMENTATION
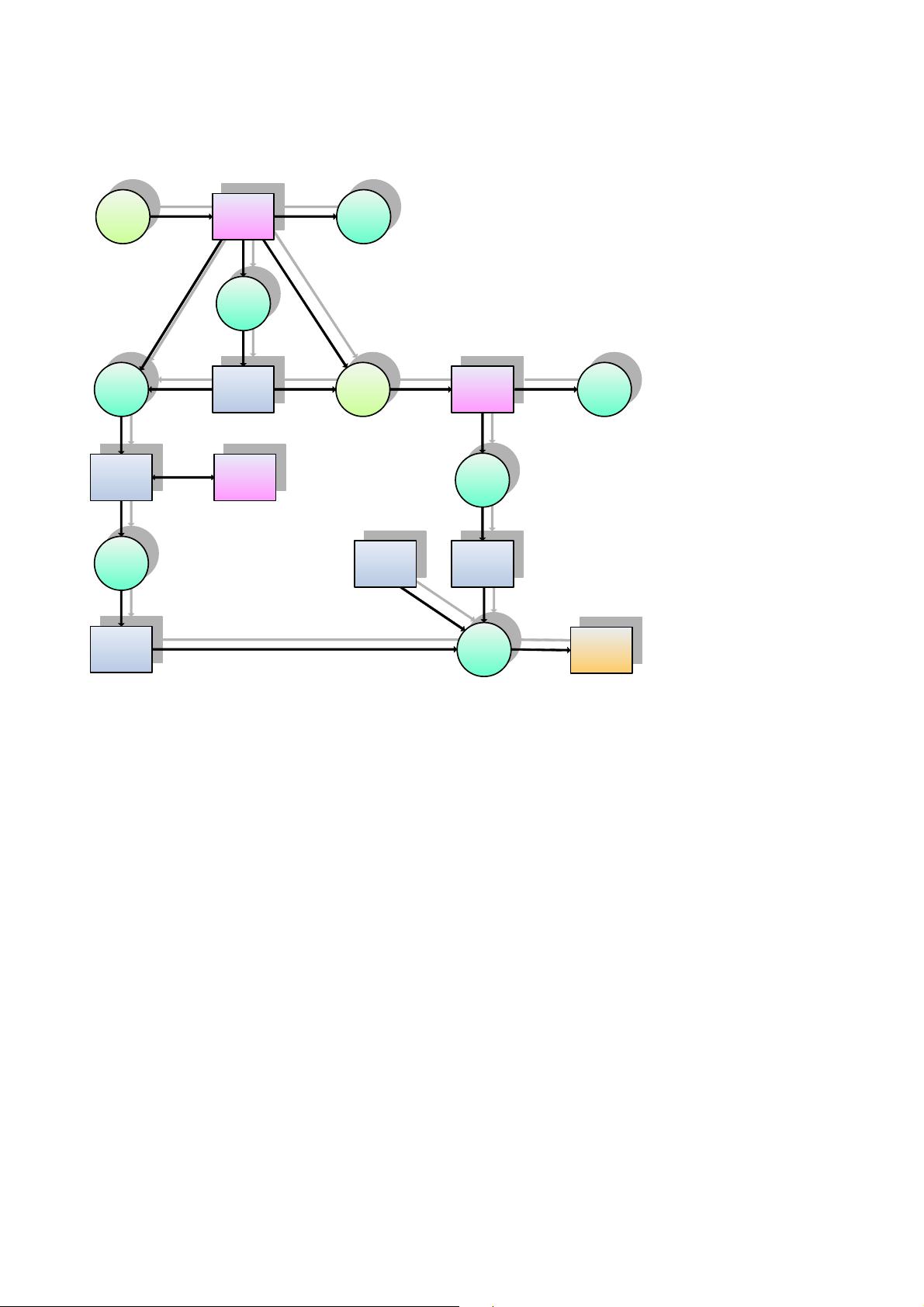
Generally, an SMP2 simulator is specified using the following types of XML files defined in the SMP2 Metamodel. The
Catalogue offers a variety of mechanisms to specify all kinds of data types in an object-oriented fashion, including
simulation models. A Package file represents, at an abstract level, a set of specific implementations of simulation
models that are specified in Catalogues. It is possible to develop multiple implementations of the same simulation
model using different Packages. The Assembly is a file type that specifies a simulator in the form of a hierarchy of
model instances, referring to their specification (in a Catalogue) and implementation (in a Package). It also contains
links to define their interaction with the other instances. Finally, the Schedule file offers a way to specify scheduling of
model instances in an assembly. SMP2’s C++ Mapping prescribes a mapping from type specifications in a Catalogue to
equivalent specifications in their language of implementation (C++). Finally, the interface between the SMP2 models
and the SMP2-compliant simulation environment is defined by the SMP2 Component Model.
剩余7页未读,继续阅读
资源评论


赵创业
- 粉丝: 2
- 资源: 30









最新资源
- 基于启发式算法的边缘计算环境深度神经网络卸载策略优化:综合DNNs应用响应时间、计算能耗及租用成本的权衡研究,边缘计算环境下深度神经网络卸载策略的优化研究:基于启发式算法的端-边-云多重资源管理策略及
- 基于紧束缚模型Matlab计算结果分析:二维SSH模型的投影能带与原胞能带对比研究,基于紧束缚模型的二维SSH模型计算:投影能带与原胞能带分析,基于紧束缚模型,使用matlab计算二维SSH模型,结果
- 4.信号和槽+事件2024-06-15.wmv
- cn.wildfirechat0.88老版本jar包,包括common-0.88.jar,sdk-0.88.jar
- 模拟芯片行业分析合集2023
- 基于模糊逻辑与递推最小二乘的整车质量估计算法:置信度评估与鲁棒性提升的应用层算法模型,基于模糊逻辑与递推最小二乘的整车质量估计算法:提高鲁棒性与估计精度,实车应用场景参考,整车质量估计算法,采用sim
- 动平衡计算工具:许用不平衡度、质量偏心度及不平衡量计算器,造纸机资料详解:残余不平衡量与允许偏重量的计算公式(N.m与g.mm),动平衡计算器:全面涵盖不平衡度与残余不平衡量计算的实用工具-造纸机资
- autosar相关资料免费分享
- 基于单片机的智能窗帘的设计
- ble自用资源上传,也免费分享
- 零基础入门转录组下游分析-加权基因共表达网络分析教程配套资源
- DeepSeek学术科研应用速成手册
- 基于Comsol粒子操控仿真的多粒子系统操作研究:双胞胎、四胞胎声镊粒子悬浮及操控实验的探讨,基于Comsol粒子操控仿真的多粒子系统操作研究:双胞胎、四胞胎及声镊悬浮技术的实践与应用,Comsol
- Rancher学习视频
- 基于双闭环控制的11电平三相MMC逆变器并网技术:载波移相调制、电容电压均衡与二倍频环流抑制的Simulink仿真研究,基于双闭环控制的模块化多电平换流器逆变器的并网设计与仿真优化:探索二倍频环流抑制
- 小红书平台2023年5月教育行业报告:女性及年轻群体为核心用户的教育市场趋势与营销策略
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


