西北工业大学软件学院计算机视觉期末复习
需积分: 5 194 浏览量
2024-01-09
08:54:35
上传
评论
收藏 1.05MB PDF 举报

计算机视觉复习纲要
一、绪论
1.什么是计算机视觉
2.计算机视觉的主要应用
3.计算机视觉的发展历程
二、图像形成
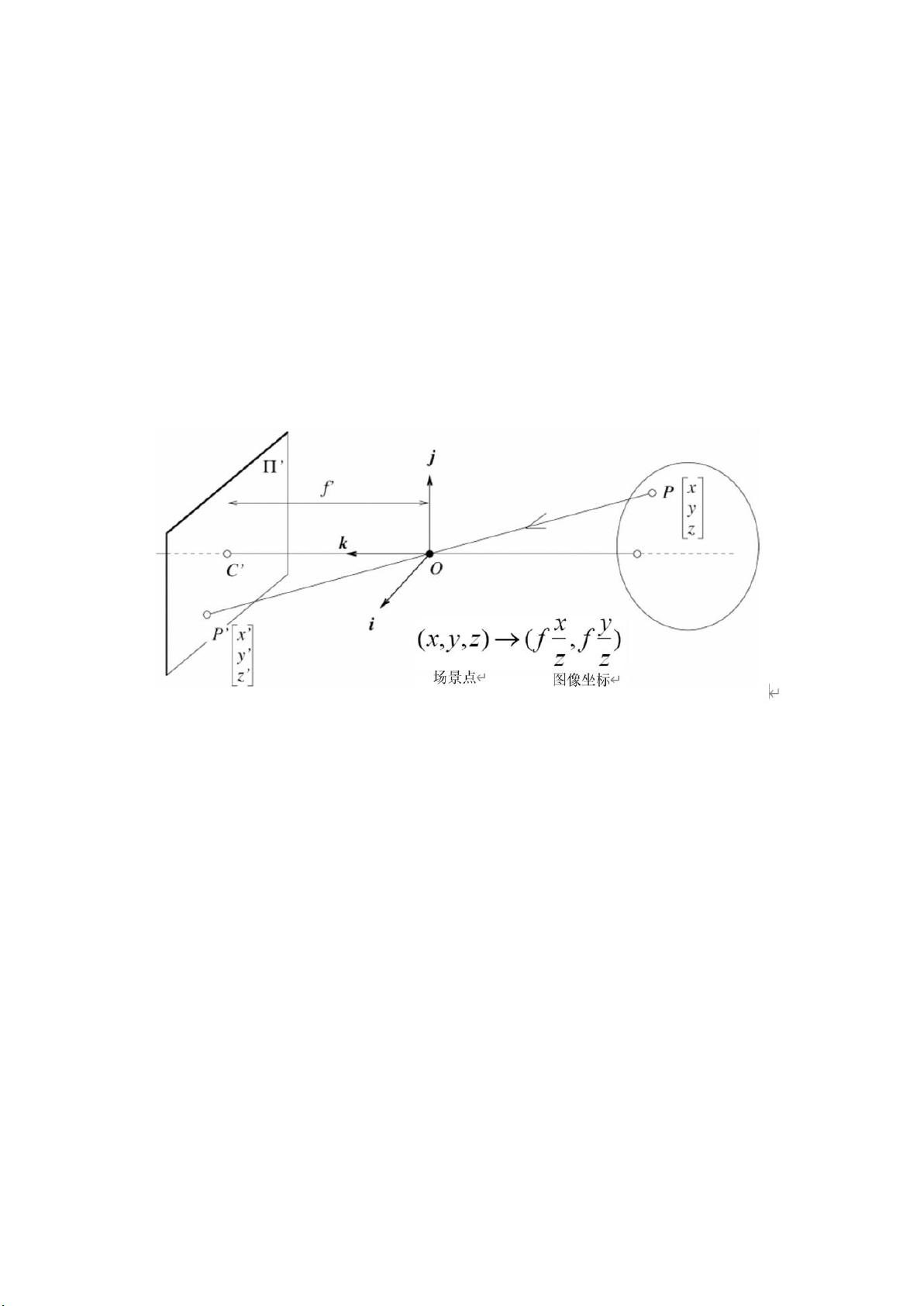
1.针孔相机模型
世界坐标系(World Coordinate System):这个坐标系建立在真实世界中,对物体
位置进行描述。
相机坐标系(Camera Coordinate System):这个坐标系的原点位于相机光心,Z 轴
与相机光轴重合,X 轴和 Y 轴位于相机成像平面上。
图像坐标系(Image Coordinate System):这个坐标系建立在成像平面上,原点通
常为图像的左上角,X 轴和 Y 轴分别表示图像的宽和高。
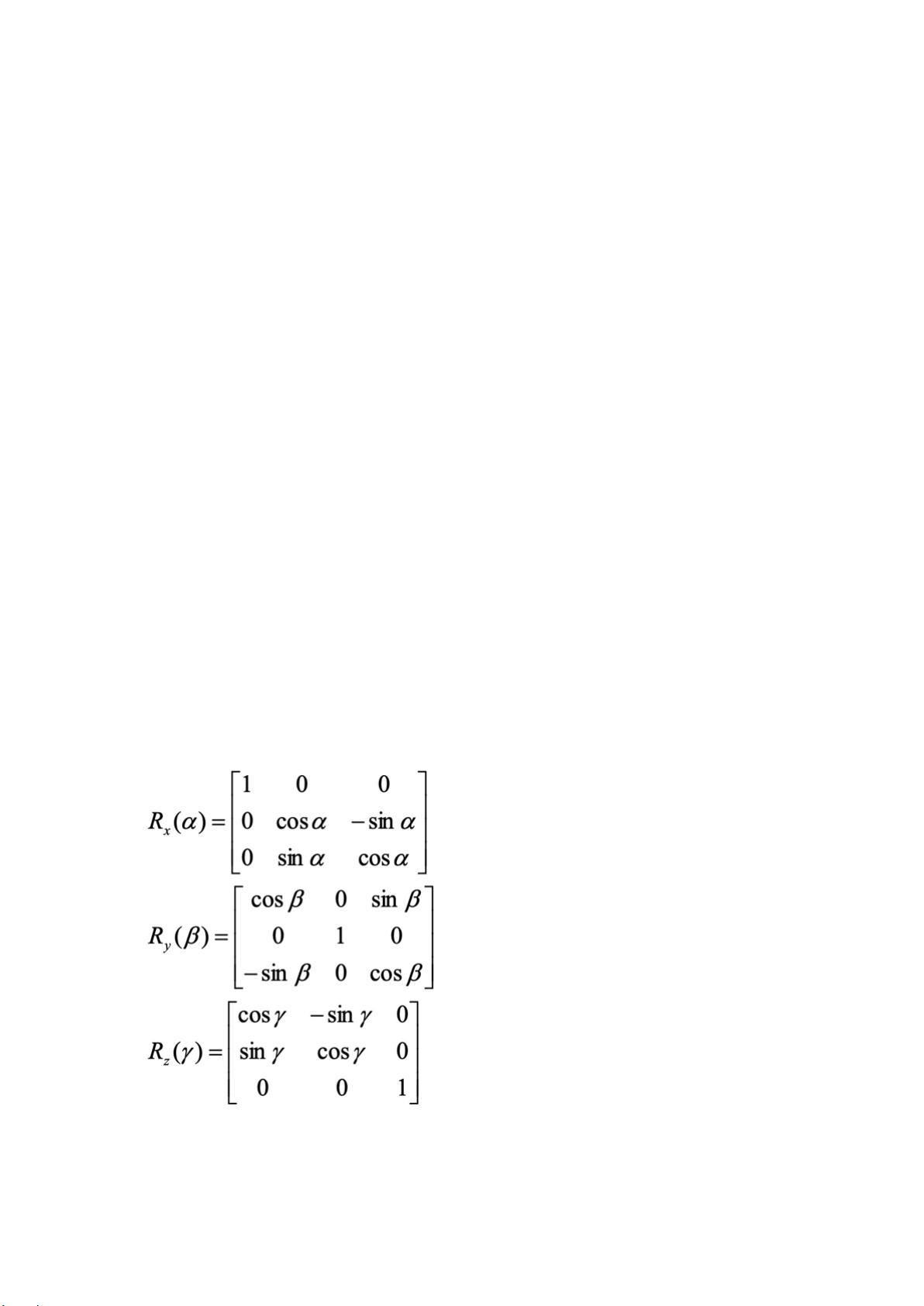
世界坐标到相机坐标的转换需要一个外参矩阵(Extrinsic Matrix),它描述了相
机在世界坐标系下的位置和方向。这个矩阵一般用 R 和 t 表示,分别表示相机的
旋转和平移。
相机坐标到图像坐标的转换需要一个内参矩阵(Intrinsic Matrix),它描述了相
机的内在参数。常用的内参矩阵包括焦距、主点坐标、像素大小等信息。
2.透镜

剩余12页未读,继续阅读
资源评论














