
Modeling and simulation of aerial refueling by finite
element method
Z.H. Zhu
a,
*
, S.A. Meguid
b
a
Department of Earth and Space Science and Engineering, York University, 4700 Keele Street, Toronto, Ont., Canada M3J 1P3
b
Engineering Mechanics and Design Laboratory, Department of Mechanical and Industrial Engineering,
University of Toronto, 5 King’s College Road, Toronto, Ont., Canada M5S 7G8
Received 6 February 2007; received in revised form 21 May 2007
Available online 8 June 2007
Abstract
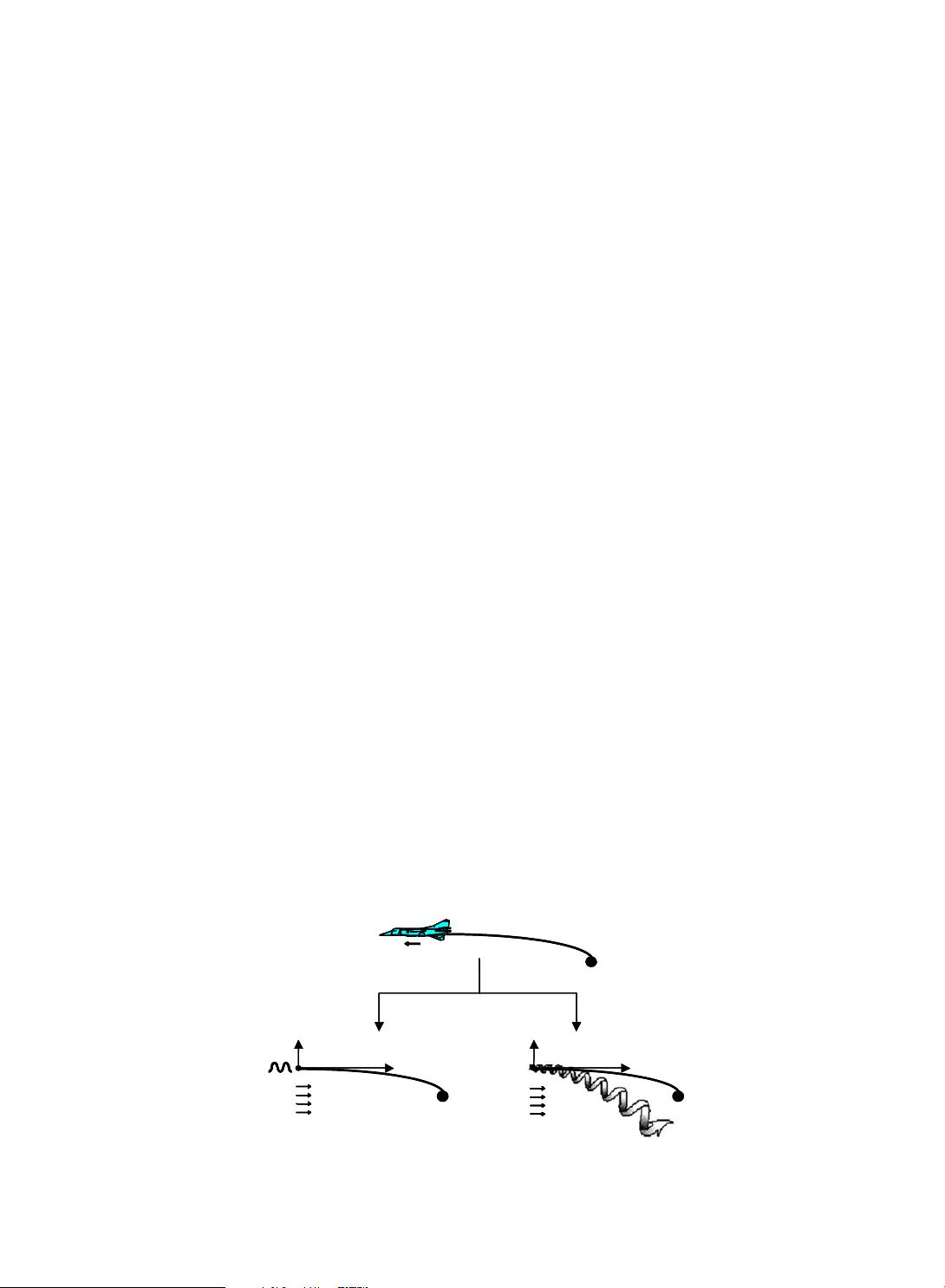
The aerial refueling hose-and-drogue system is a special case of a generalized aerial cable towed system. The present
work investigates the effect of pertinent parameters such as the cable tension, tow point disturbance and vortex wake
on the dynamic behavior and stability of the generalized model by using the finite element method with an accurate
and computationally efficient three-noded, curved beam element. The analysis results show that the conventional modal
and spectrum analysis method is inappropriate for the dynamic stability analysis of the aerial cable towed system. This
is because the mechanism of instability due to the tow point disturbance is not the resonance of the aerial cable towed
system but the wave propagation downstream along the cable absorbing energy from the airflow when the wave propaga-
tion speed is less than the airflow speed. The study also demonstrates that the vortex wake has a significant impact on the
dynamics of the aerial cable towed system. The short cable system will orbit with the vortex and the orbiting behavior will
diminish as the cable length increases.
Ó 2007 Elsevier Ltd. All rights reserved.
Keywords: Aerial refueling; Finite element method; Curved beam; Dynamic modeling; Simulation
1. Introduction
By far the most common method for in-flight refueling is the probe-and-drogue system, in which a tanker
aircraft deploys a hose behind it with a drogue on the end of the hose (a meshwork cone whose drag keeps the
hose in a stable position). A receiving aircraft approaches the drogue with a probe, which is inser ted into the
drogue to link the fuel systems. It is reported that the hose-and-drogue system suffered a 2.5% failure rate in
operation (Gates and McCarthy, 2000). Most of the incidents occur when the hose becomes slack and loses the
stabilizing effect of hose tension due to: (i) a malfunction of the hose reel mechanism failing to take up the
slacking hose, (ii) unstable motion of the tanker, (iii) vortex induced wake behind the tanker, and (iv) poor
design of the drogue, to name just a few. As a result, the hose becomes unstable, high tension spikes are gen-
0020-7683/$ - see front matter Ó 2007 Elsevier Ltd. All rights reserved.
doi:10.1016/j.ijsolstr.2007.05.026
*
Corresponding author. Tel.:+ 1 416 736 2100x77729; fax: +1 416 736 5817.
E-mail address: gzhu@yorku.ca (Z.H. Zhu).
Available online at www.sciencedirect.com
International Journal of Solids and Structures 44 (2007) 8057–8073
www.elsevier.com/locate/ijsolstr

剩余16页未读,继续阅读
资源评论













