
简述博图运动控制中两种回原点模式的区别
1、MODE=0,绝对式直接回原点
2、MODE=3,主动回原点
前言
在使用博图软件编写程序控制伺服/步进的过程中,我们必然会使用到回原
点功能,我个人在刚开始使用回原点指令 MC_HOME 时,并没有完全弄清楚几种
回原点方式的区别以及适合的应用场景,现反复研究之后稍有领悟,分享于各
位(针对新手,大神勿喷)。
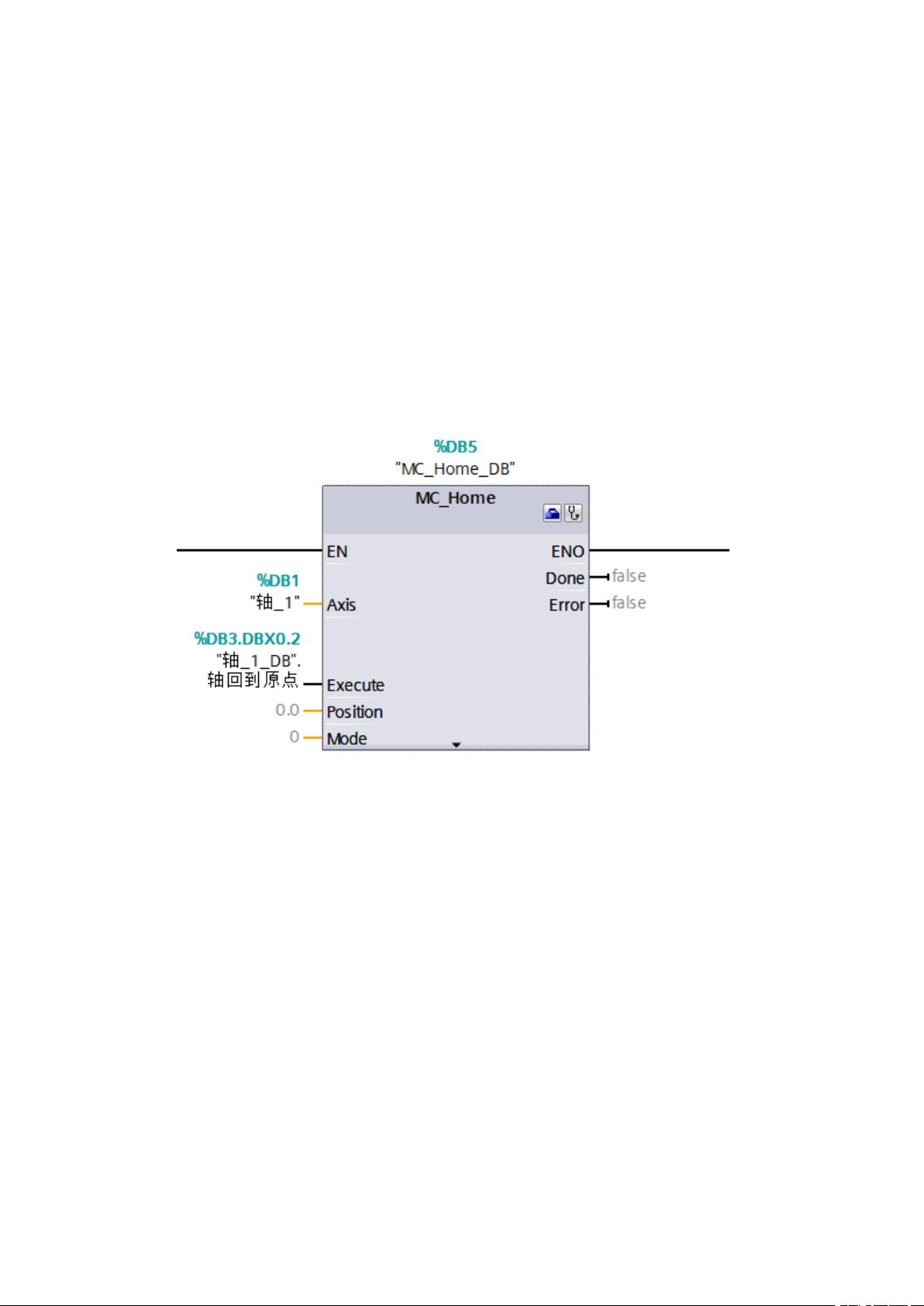
MODE=0,“绝对式直接回原点”,执行该模式轴不会自动运行,当 Execute
管脚接通时,将 Position 的值定义为原点值。如图:
使用场景:当需要轴回原点时,利用点动指令将轴控制在自己想要的方向
和速度,移动轴至原点检测开关处,然后接通 Execute 管脚,定义原点位置,
此方式可以保证每次回原点的路径受控,避免可能发生的机械碰撞等。也适用
于无原点检测开关,原点位置由用户根据不同产品或工件自己设定的情况。
MODE=3,“主动回原点”,该回原点模式必须配置机械的原点限位开关,使
用时在轴组态中必须勾选“允许硬限位开关处自动反转”,否则轴可能无法自动
找到原点,如图:
资源评论


T_ICARUS
- 粉丝: 0
- 资源: 1









最新资源
- 【岗位说明】珠宝组长岗位职责.doc
- 【岗位说明】珠宝设计岗位职责.docx
- 【岗位说明】药店店长工作职责.doc
- 【岗位说明】药店营业员岗位职责.doc
- 【岗位说明】药店店长工作手册.doc
- 【岗位说明】药店营业员工作流程.doc
- 【岗位说明】药房操作规程最新版.doc
- 【岗位说明】药品库工作人员岗位职责.doc
- 【岗位说明】海迈斯装饰岗位职责.doc
- 【岗位说明】安装工程师岗位职责.doc
- 【岗位说明】装饰公司岗位职责.docx
- 【岗位说明】装修公司岗位职责.doc
- 【岗位说明】装修公司岗位职责及结构图.doc
- 【岗位说明】精装工程师岗位职责.doc
- 【岗位说明】装修公司框架及岗位职责.docx
- 【岗位说明】装修业务员岗位职责(最新篇).doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


