智能小车的设计与制作
《智能电动小车》
摘要:本课题组设计制作了一款具有智能判断功能的小车,功能强大。小车具有以下几个功能:自动避障
功能;寻迹功能(按路面的黑色轨道行驶);趋光功能(寻找前方的点光源并行驶到位);检测路面所放
置的铁片的个数的功能;计算并显示所走的路程和行走的时间,并可发声发光。作品可以作为高级智能玩
具,也可以作为大学生学习嵌入式控制的强有力的应用实例。
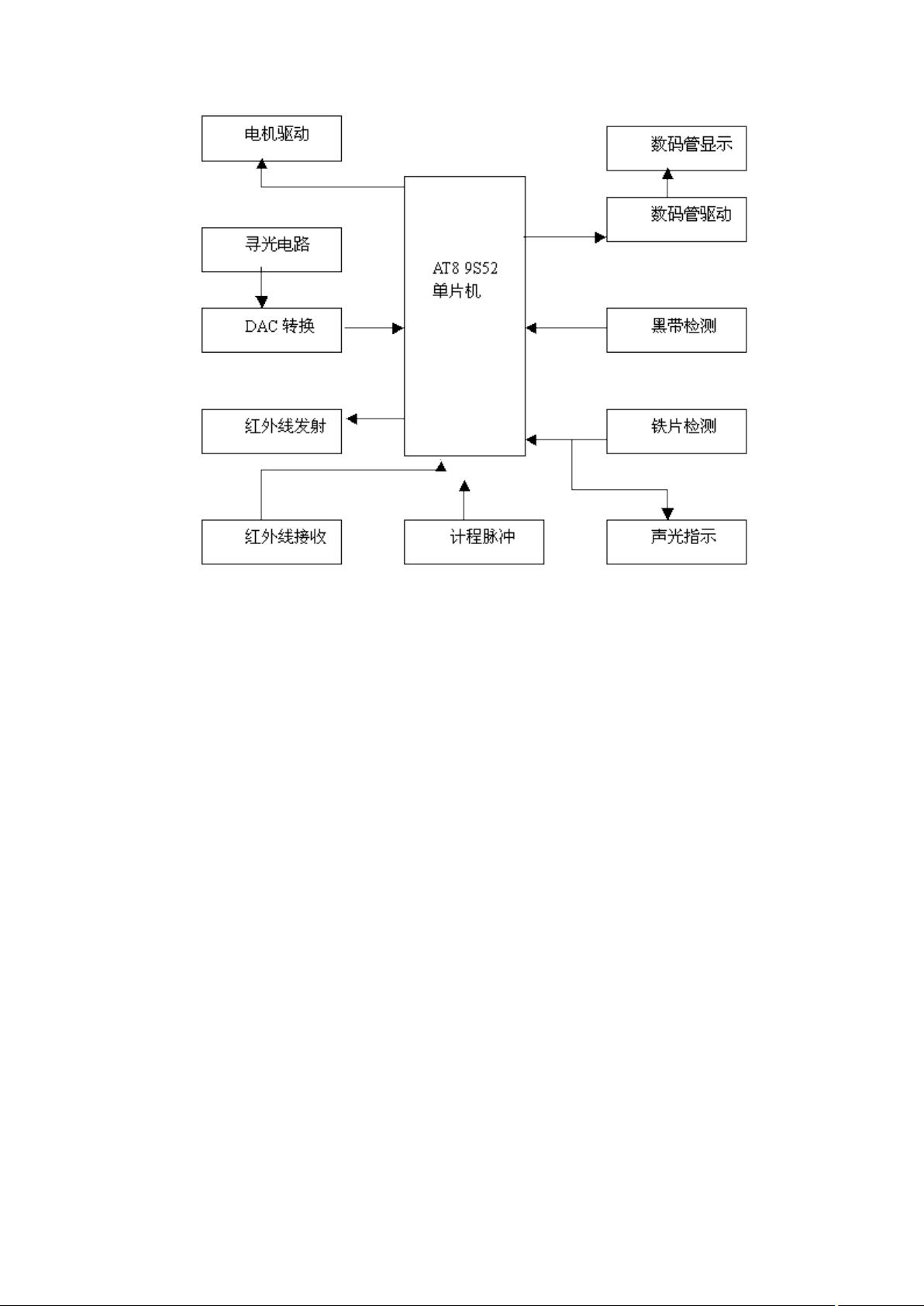
作品以两电动机为主驱动,通过各类传感器件来采集各类信息,送入主控单元 AT89S52 单片机,处理
数据后完成相应动作,以达到自身控制。电机驱动电路采用高电压,高电流,四通道驱动集成芯片 L293D。
其中避障采用红外线收发来完成;铁片检测部分采用电感式接近开关 LJ18A3-8-Z/BX 检测;黑带检测采用
红外线接收二极管完成;趋光部分通过 3 路光敏二极管对光源信号的采集,再经过 ADC0809 转化为数字信
号送单片机处理判别方向。由控制单元处理数据后完成相应动作,实现了无人控制即可完成一系列动作,
相当于简易机器人。
关键字:智能控制 蔽障 红外线收发 寻迹行驶 趋光行驶
1.总体方案论证与比较
方案一:采用各类数字电路来组成小车的控制系统,对外围避障信号,黑带检测信号,铁片检测信号,
各路趋光信号进行处理。本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,对各路信号
处理比较困难。
方案二:采用 ATM89S52 单片机来作为整机的控制单元。红外线探头采用市面上通用的发射管与及接
收头,经过单片机调制后发射。铁片检测采用电感式接近开关 LJ18A3-8-Z/BX 检测,黑带采用光敏二极管
对光源信号采集,再经过 ADC0809 转化为数字信号送到单片机系统处理。此系统比较灵活,采用软件方法
来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
比较以上两种方案的优缺点,方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采用方
案二来实现。方案二的基本原理如图 1 所示。