
A Multi-Features Based Corner Detection Method
Jie Teng, Jian Li, Xiangjing An, Hangen He
National university of defense technology
College of Mechatronic Engineering and Automation
Changsha, China
e-mail: TengJayNudt@163.com
Abstract—To improve the accuracy of corner’s detection in the
traditional black and white chessboard, a new method based
on multi-features is proposed. Three distinct local features of
the corners have been analyzed, they are structural response,
symmetric response and edge response. By selectively applying
these features, initial selection and later screening of potential
corners have been done. Non-maximum suppression (NMS)
has been used to generate original potential corner candidates,
which could be scored by the combination of feature responses
mentioned above. With all scores reasonably thresholded, false
corners could be removed. Meanwhile, sub-pixel level of corner
coordinates is achieved using the orthogonality of potential
corners and adjacent pixels. Experimentally, final results
prove the effectiveness and robustness of the proposed method
with high sub-pixel accuracy.
Keywords-chessboard corner detection; cross entropy; non-
maximum suppression; fisheye camera
I. INTRODUCTION
Panoramic system is a part of Advanced Driver Assistance
Systems, in which camera, as a very important sensor, is
widely applied. In order to represent sensed information in a
common coordinate system, each camera requires precise
and robust calibration. Hereby, each sensor can be
characterized by its intrinsic and extrinsic parameters, which
often use black and white chessboard as its target. In 2000,
Zhang [1] put forward a new calibration algorithm based on
chessboard corner detection, achieving high calibration
accuracy and robust performance. However, the good result
could become bad if the preciseness of corner detection is
not good enough. Furthermore the facility of corner detection
is also an important factor to achieve automatic camera
calibration, which is the main trend both in application and
art [2].
The key point of calibration is obtaining the accurate
expected corner coordinates in all kinds of pictures which
always be contaminated by lens distortion and noises. Harris
operator is the earliest common corner detector based on
Gaussian gradient. But with lots of false corners showed up,
it fails when picture becomes blurred. Recently, Dai [3] and
Zhao [4] have proposed corner detection methods by using
morphology and symmetry of chessboard structure.
However, current corner detection tools such as the widely
used Opencv [5] or Matlab Camera Calibration Toolbox [6]
(denoted as MCCT), are either not robust or often require
manual intervention.
In this work, we try to propose a robust solution to
improve the accuracy and facility of chessboard corner
detection. Our approach relies on cheap printed chessboard
patterns with arbitrary rows and columns, see Fig. 1 for an
illustration. As input, our method requires a single shot of
any kind of camera with chessboard in sight. In chapter II
We make a brief discussion of corner features that we will
use later. Then the detail description and analysis of each
feature are given. Meanwhile, Corner location refinement
with high Sub-pixel accuracy is given as well. In the last
chapter, we experimentally show the robustness of our
method which achieves almost the same corner detection
level as manual invention required MCCT.
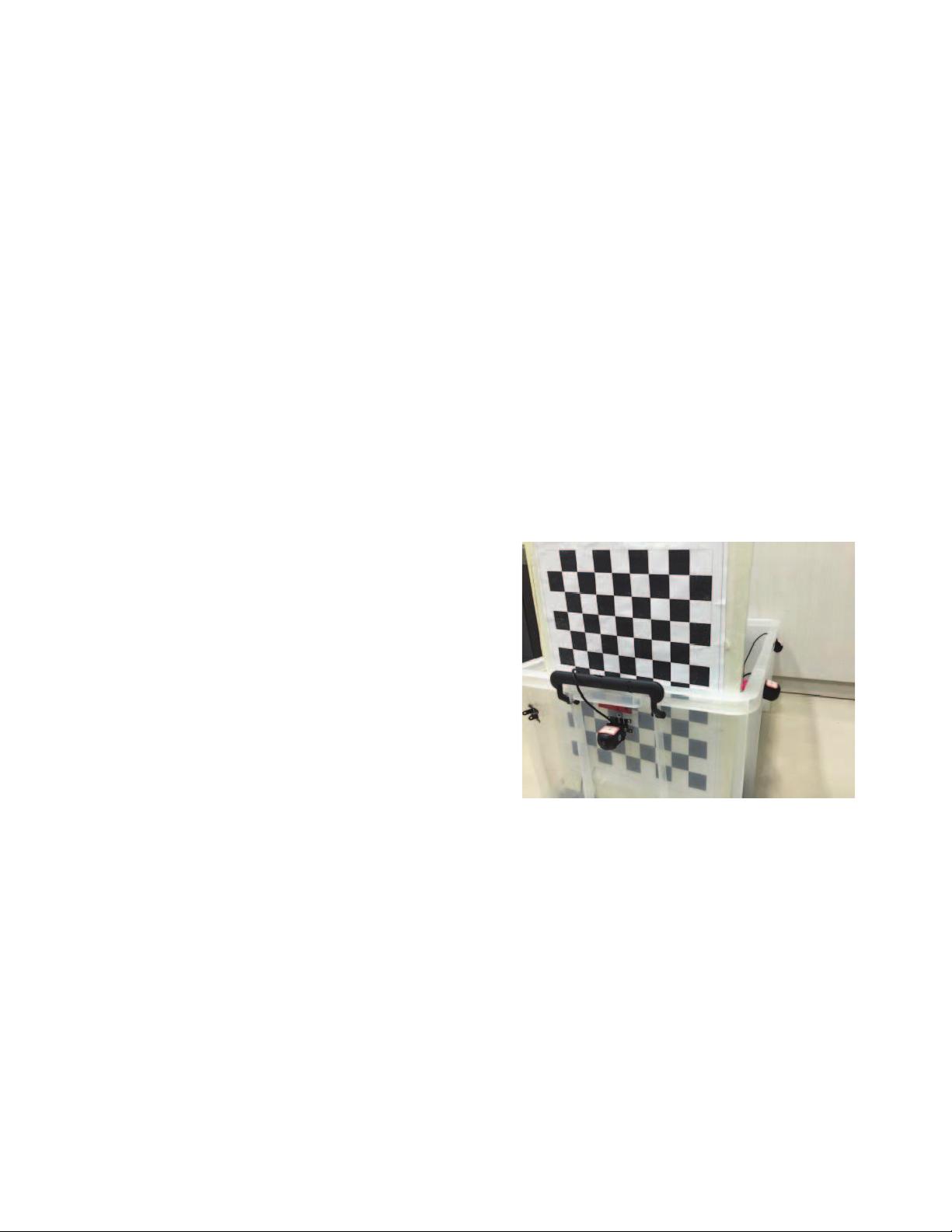
Figure 1. Experimental setup fisheye cameras fixed in a plastic box and a
printed chessboard.
II.
D
ISCUSSION OF CHESSBOARD CORNER FEATURES
Here, we give the definition of chessboard corner: the
intersection of two symmetric black and white cells. Then,
these adjacent pixels around chessboard corner are divided
into 4 quadrants. Obviously the expected corners have some
features detailed as follow:
x
Ideal corners have the greatest gray difference
between quadrant I and III or quadrant II and IV.
x
Pixels in quadrant I and III are symmetric, the same
as quadrant II and IV.
x
Each wanted corner uniquely has two edges, and
strongest response in the gradient image.
,(((,QWHUQDWLRQDO&RQIHUHQFHRQ6LJQDODQG,PDJH3URFHVVLQJ
978-1-5090-2377-6/16/$31.00 ©2016 IEEE
资源评论


JasmineCC6
- 粉丝: 0
- 资源: 1









最新资源
- 白色大气风格的摇滚音乐网站模板下载.zip
- 白色大气风格的医疗公司模板下载.zip
- 白色大气风格的医院网站模板下载.zip
- 白色大气风格的医疗设备企业网站模板.zip
- 白色大气风格的医院网页模板下载.zip
- 白色大气风格的英文网站模板下载.zip
- 白色大气风格的医院医疗网站模板下载.zip
- 白色大气风格的移动设备APP官网模板下载.zip
- 白色大气风格的有机小麦种植业网站模板下载.zip
- 白色大气风格的游泳体育竞技网站模板下载.zip
- 白色大气风格的影视传媒公司企业网站源码下载.zip
- 白色大气风格的中国教学教育网站模板下载.zip
- 白色大气风格的运动鞋销售网站模板下载.zip
- 白色大气风格的重工业公司模板下载.zip
- 白色大气风格的珠宝首饰网站模板下载.zip
- 白色大气风格的珠宝首饰官网整站网站源码下载.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


