厦门地铁培训资料-车载信号部分综述.pdf
版权申诉
184 浏览量
2022-07-08
04:41:03
上传
评论
收藏 1.66MB PDF 举报


第三篇 车载信号部分
第一章 车载信号系统
第一节 概述
厦门一号线的信号系统是从卡斯柯公司引进的 Urbalis888 设备,主要由以下子系统组成:
➢ ATS 子系统;
➢ ATP/ATO 子系统;
➢ 计算机联锁(CBI)子系统;
➢ 信号集中监测子系统;
➢ 数据通信(DCS)子系统。
其整体结构如下:
控制中心 车辆段/停车场
MSS
ATS-WS
CBI
LATS
ZC
CBI
AC
继电
设备
车辆段
试车线
继电
设备
其它
AC
CBI
LC
ATS-WS
AC
车辆段
培训中心
ATS-WS
继电
设备
AP
CC
ZC
LATS
DTI
停车场
备用控制中心
CATS
MSS
CATS
MSS
DCS冗余通信网络
非设备集中站
ATS-WS
MSS
CBI
LATS
ZC
仅设于镇海路
站、杏锦路
站、岩内北广
场站
LC
仅设于
岩内北
广场站
IBP
DTI
ESB
ESB
PSD
AC PM
RB
AC AC
RB
LEU
I/
O
PSD
AC
CC
ATS-WS
停车场
维修中心
无线通信
系统
DCS AP
MSS
DCS AP
设备集中站
AC 继电设备
DTI
IBP
2.4GHz
自由无线
I/
O
CC
信号机
信号机
RB
图 1.1.1 Urbailis888 线路总体结构
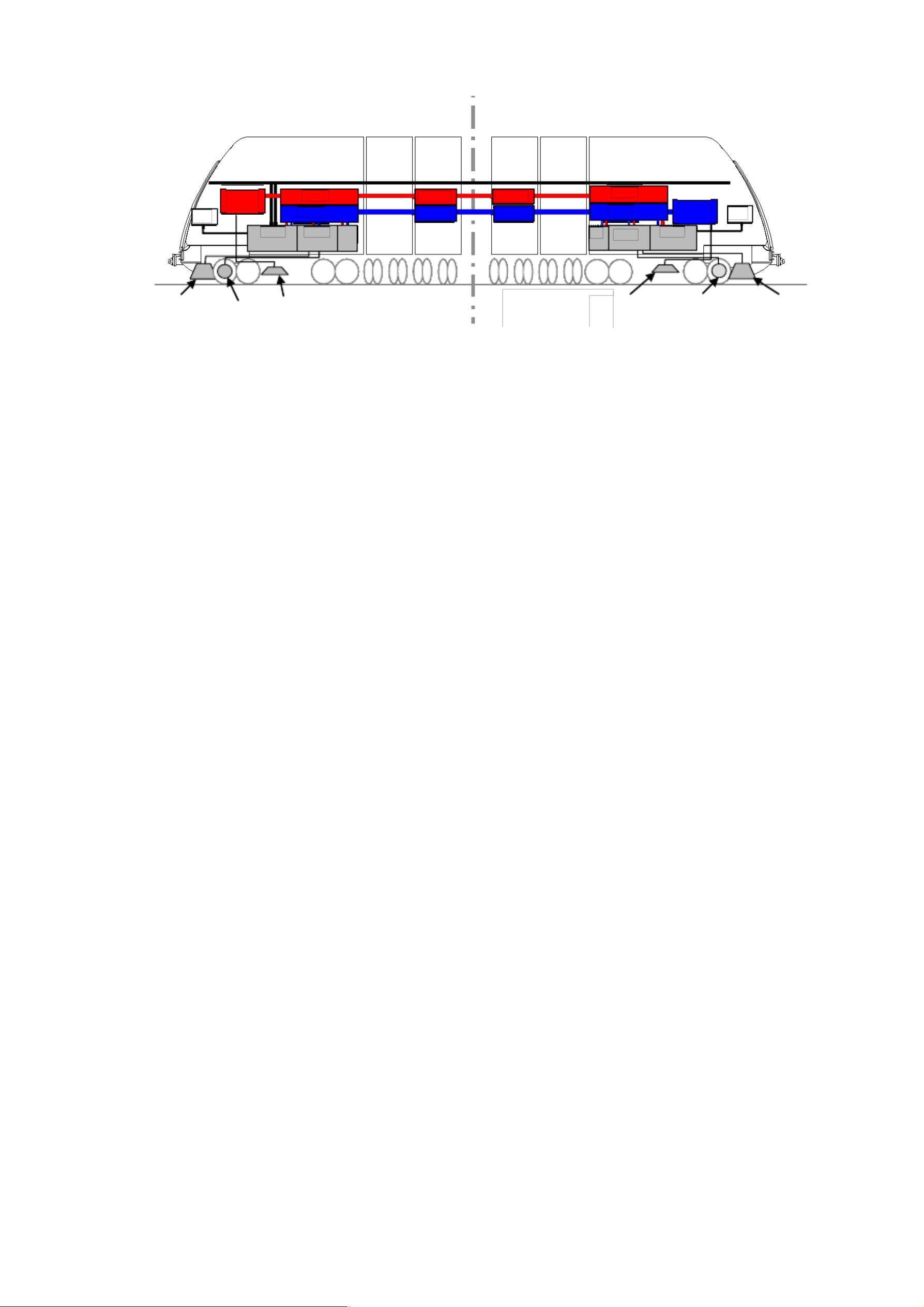
车载的 CBTC 网络是冗余的,分别用蓝色和红色画出。它由两个车载控制器、两个司
机显示单元、两个调制解调器(每端安装两个无线 DCS 天线)、两套编码里程计和两个信标
天线以及信号相关按钮和指示灯等组成。


剩余28页未读,继续阅读
资源评论













