grid_num = 7 # 论文中设为 7
target = torch.zeros((grid_num, grid_num, 30)) # 和模型输出张量维尺寸一样
都是 14*14*30
cell_size = 1./grid_num # 之前已经把目标框的坐标进行了归一化(这里与原论文有
区别),故这里用 1.作为除数
# 计算目标框中心点坐标和宽高
wh = boxes[:, 2:]-boxes[:, :2]
cxcy = (boxes[:, 2:]+boxes[:, :2])/2
# 1,遍历各个目标框;
for i in range(cxcy.size()[0]): # 对应于数据集中的每个框 这里
cxcy.size()[0] == num_samples
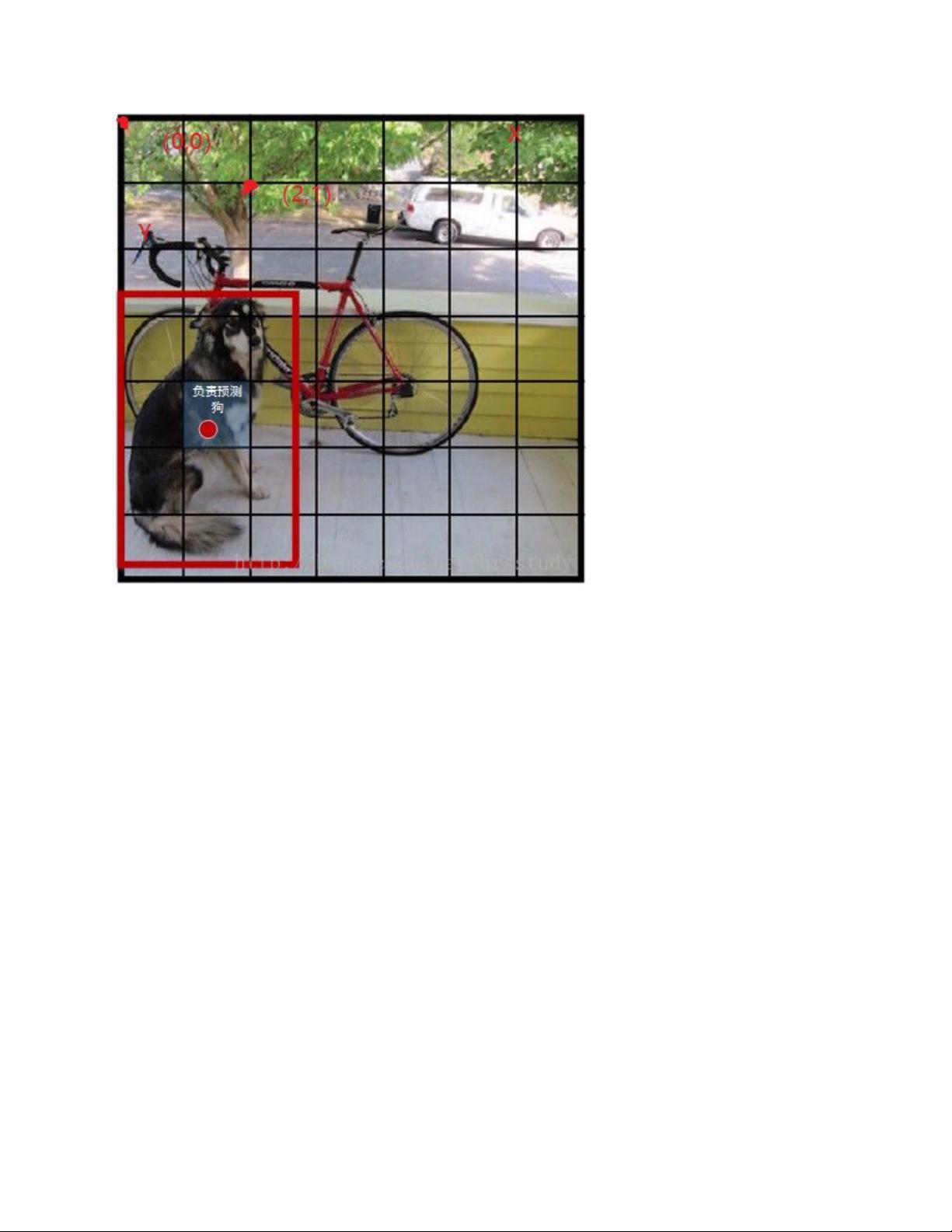
# 2,计算第 i 个目标中心点落在哪个 `grid` 上,`target` 相应位置的两个框的
置信度值设为 `1`,同时对应类别值也置为 `1`;
cxcy_sample = cxcy[i]
ij = (cxcy_sample/cell_size).ceil()-1 # ij 是一个 list, 表示目标中心点
cxcy 在归一化后的图片中所处的 x y 方向的第几个网格
# [0,1,2,3,4,5,6,7,8,9, 10-19] 对应索引
# [x,y,w,h,c,x,y,w,h,c, 20 个类别的 one-hot 编码] 与原论文输出张量维度各
个索引对应目标有所区别
target[int(ij[1]), int(ij[0]), 4] = 1 # 第一个框的置信度
target[int(ij[1]), int(ij[0]), 9] = 1 # 第二个框的置信度
target[int(ij[1]), int(ij[0]), int(labels[i])+9] = 1 # 第
int(labels[i])+9 个类别为 1
# 3,计算目标中心所在 `grid`(网格)的左上角相对坐标:`ij*cell_size`,然
后目标中心坐标相对于子网格左上角的偏移比例 `delta_xy`;
xy = ij*cell_size
delta_xy = (cxcy_sample -xy)/cell_size
# 4,最后将 `target` 对应网格位置的 (x, y, w, h) 分别赋相应 `wh`、
`delta_xy` 值。
target[int(ij[1]), int(ij[0]), 2:4] = wh[i] # 范围为(0,1)
target[int(ij[1]), int(ij[0]), :2] = delta_xy
target[int(ij[1]), int(ij[0]), 7:9] = wh[i]
target[int(ij[1]), int(ij[0]), 5:7] = delta_xy
return target
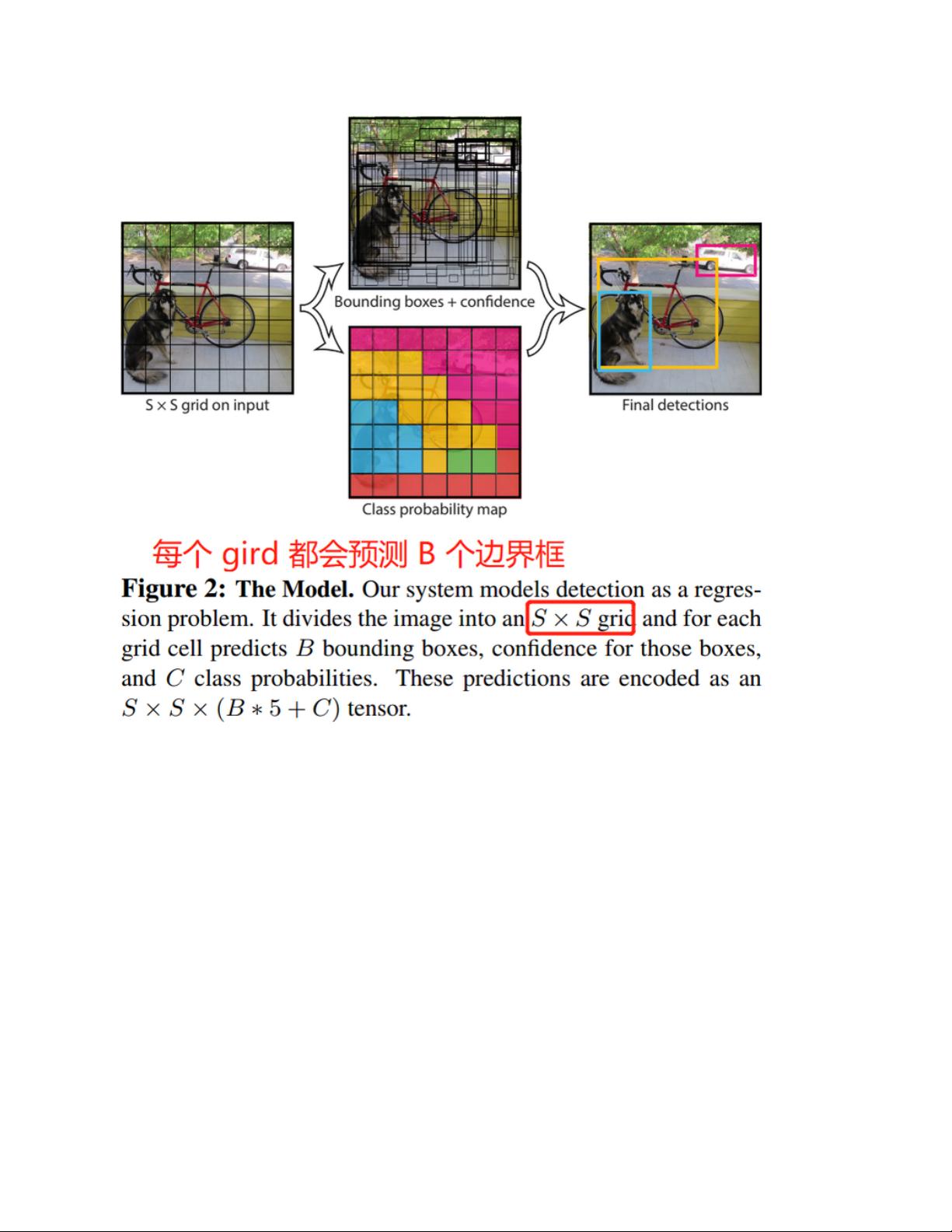
代码分析,一张图片对应的标签张量 target 的维度是 7 \times 7 \times 30 。然后分别对
各个目标框的 boxes: (x1,y1,x2,y2) 和 labels:(0,0,...,1,0)(one-hot 编码的目标类别信
息)进行处理,符合检测系统要求的输入形式。算法步骤如下:
1. 计算目标框中心点坐标和宽高,并遍历各个目标框;
2. 计算目标中心点落在哪个 grid 上,target 相应位置的两个框的置信度值设为 1,
同时对应类别值也置为 1;
3. 计算目标中心所在 grid(网格)的左上角相对坐标:ij*cell_size,然后目标中
心坐标相对于子网格左上角的偏移比例 delta_xy;