多核系统的高性能并行故障仿真
35 浏览量
2024-02-03
16:52:27
上传
评论
收藏 400KB PDF 举报

High-Performance Parallel Fault Simulation for
Multi-Core Systems
Masoomeh Karami
∗
, Mohammad-hashem Haghbayan
∗
, Masoumeh Ebrahimi
†
, Hamid Nejatollahi
‡
,
Hannu Tenhunen
†
, and Juha Plosila
∗
∗
Department of Future Technologies, University of Turku, Turku, Finland.
†
Department of Electronics and Embedded Systems, Royal Institute of Technology (KTH), Kista, Sweden.
‡
University of California, Irvine, CA USA.
Emails:
∗
{mkaram, mohhag, juplos}@utu.fi
†
{mebr,hannu}@kth.se
‡
hnejatol@uci.edu
Abstract—Fault simulation is a time-consuming process that
requires customized methods and techniques to accelerate it.
Multi-threading and Multi-core approaches are two promising
techniques that can be exploited to accelerate the fault simulation
process by using different parts of the hardware at the same
time. However, an efficient parallelization is obtained only by the
refinement of software with respect to the hardware platform. In
this paper, a parallel multi-thread fault simulation technique is
proposed to accelerate the simulation process on multi-core plat-
forms. In this approach, the gate input values are independently
assigned to each thread. Each input value carries the information
of several parallel simulation processes. This provides a multi-
thread parallel fault simulation environment. The experimental
results show that the proposed technique can efficiently use
the hardware platform. In a single-core platform, the proposed
technique can reduce the time by 25% while in a dual-core
increasing the thread approximately halves the execution time.
Index Terms—Multi-core system, multi-threading, paralleliza-
tion, fault simulation
I. INTRODUCTION
Fault simulation (FS) plays an essential role in different
fields, such as test pattern generation, built-in-self-test, con-
trollability, and observability analysis [1], [2]. This process is
a challenging and time-consuming task in the VLSI design.
In FS, a circuit-under-test (CUT) is simulated for a given
fault model and a set of test patterns. This process is often
computationally intensive, particularly for modern systems that
require a large number of test patterns.
One of the most popular fault models for VLSI circuits is
the stuck-at fault model [2]. Several works have used parallel
and concurrent FS approaches to minimize the FS execution
time for the stuck-at fault model in single-core [2], [3] and
multi-core processors [4], [5]. They also use different methods
such as mixed-level fault simulation, parallelization, and event-
driven to accelerate the FS process. Mixed-level FS is an ap-
proach where non-faulty parts of a circuit are simulated faster
using a higher abstraction level, e.g., behavioral level [6]. As
FS has parallelizable characteristics, parallel processing has
been widely used for minimizing the execution time. One
parallelization technique is to partition the circuit into mutually
exclusive parts and simulate them in parallel [7], [8]. Other
parallelization solutions are based on simulating the circuit
in parallel for different sets of faults (data-parallel) or test
patterns (pattern-parallel) [9], [10].
There are two methods for implementing gate-level fault
simulation: time-driven FS and event-driven FS. In the time-
driven FS, the simulator calculates and updates all the gates’
input/output variables in each small time epoch. In the event-
driven FS, the gates’ input/output variables are calculated
based on the new occurred event, e.g., a change in the wire
value. The event-driven method is more efficient compared to
the time-driven method by being faster, using less memory,
and being more flexible [11], [12].
In this paper, a parallel event-driven FS technique is pro-
posed for multi-core systems to minimize the FS time. We
describe the entire process from fault injection to scheduling
tasks for parallel computing on different cores. The proposed
technique is based on parallel processing of the occurred
events in each level of the netlist.
II. PARALLEL EVENT-DRIVEN FAULT SIMULATION
In this section, we investigate two separate techniques to
reduce the fault-simulation (FS) time, i.e., parallel FS [4],
[5] and event-driven FS [13], [14], [11]. The considered fault
model in this paper is stuck-at-0 (S@0) or stuck-at-1 (S@1)
[2]. In a simple FS technique, after generating faults and
eliminating the overlapping faults, i.e., fault collapsing [2],
[15], faults are injected into the design. Then, the output of
the design is compared with the expected value, i.e., golden
output. If the output is the same as the golden output, it means
the fault is not propagated to the output, and thus it is masked.
Otherwise, it is said that the injected fault is observed and
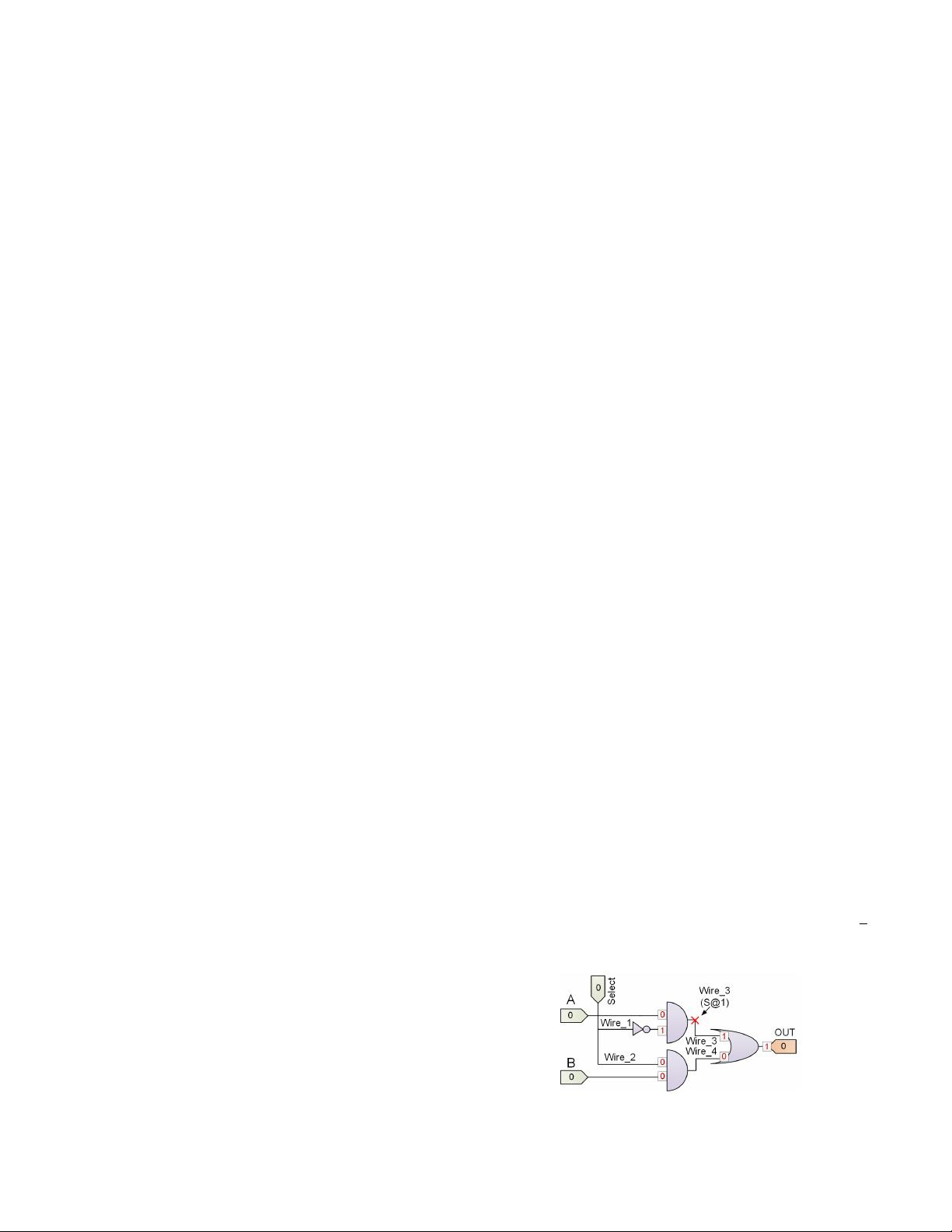
detected. For example, Figure 1 shows a 1-bit multiplexer
where the output should be 0 when the signals {A, B, and
SELECT } are {000}. However, the S@1 fault on wire 3
results in OUT =1, which is different from the golden result,
and thus a fault is detected.
Fig. 1: An example of stuck-at FS in a 1-bit multiplier
资源评论


F87523399332578_
- 粉丝: 386
- 资源: 1











