cvpr17-pointnet-slides

需积分: 0 96 浏览量
更新于2023-07-16
收藏 6.26MB PDF 举报
PointNet:深度学习在点云上的应用
PointNet 是一种基于深度学习的点云处理方法,由 Charles R. Qi、Hao Su 和 Kaichun Mo 等人提出,旨在解决点云分类和分割问题。下面是 PointNet 的详细介绍:
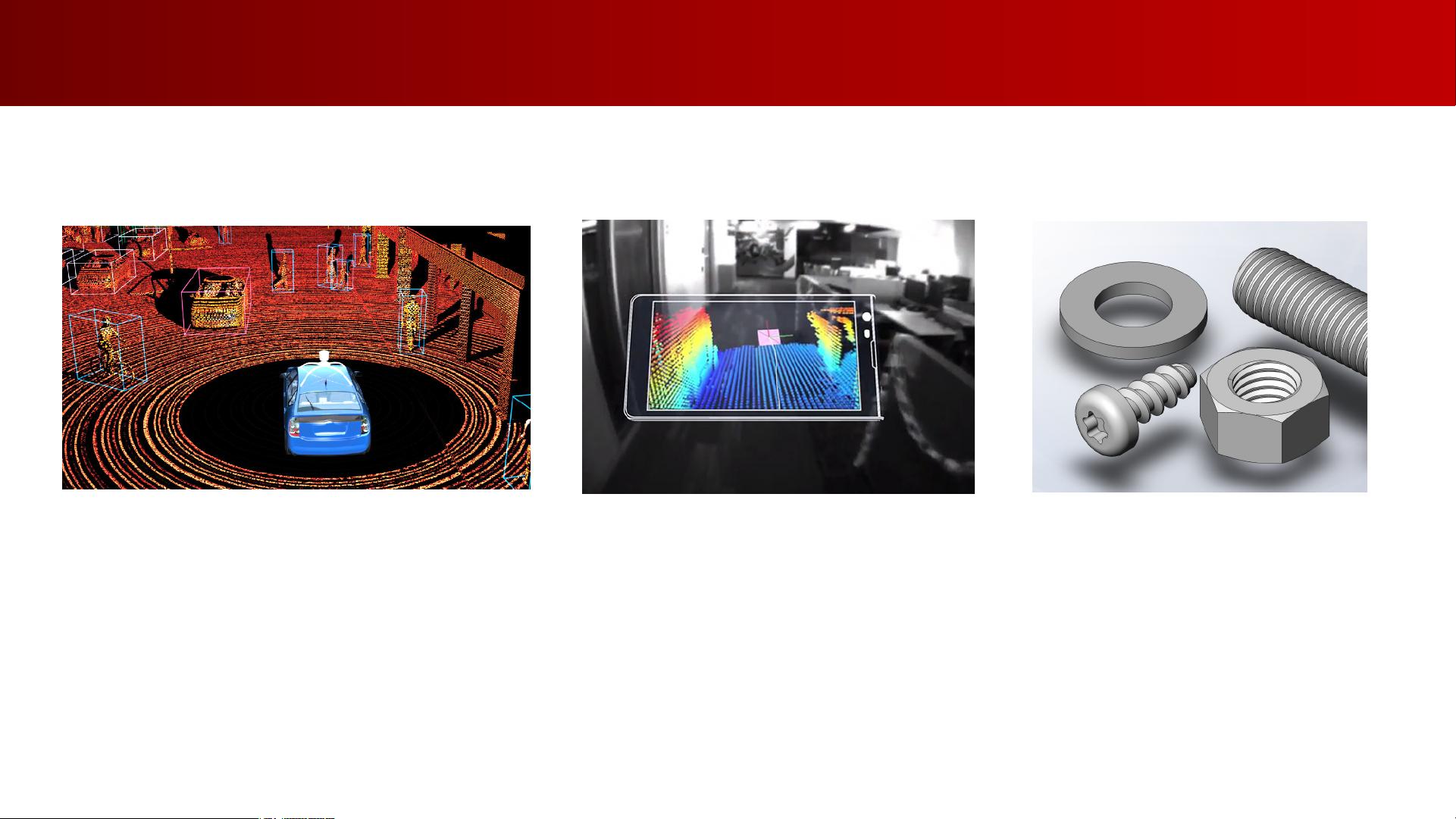
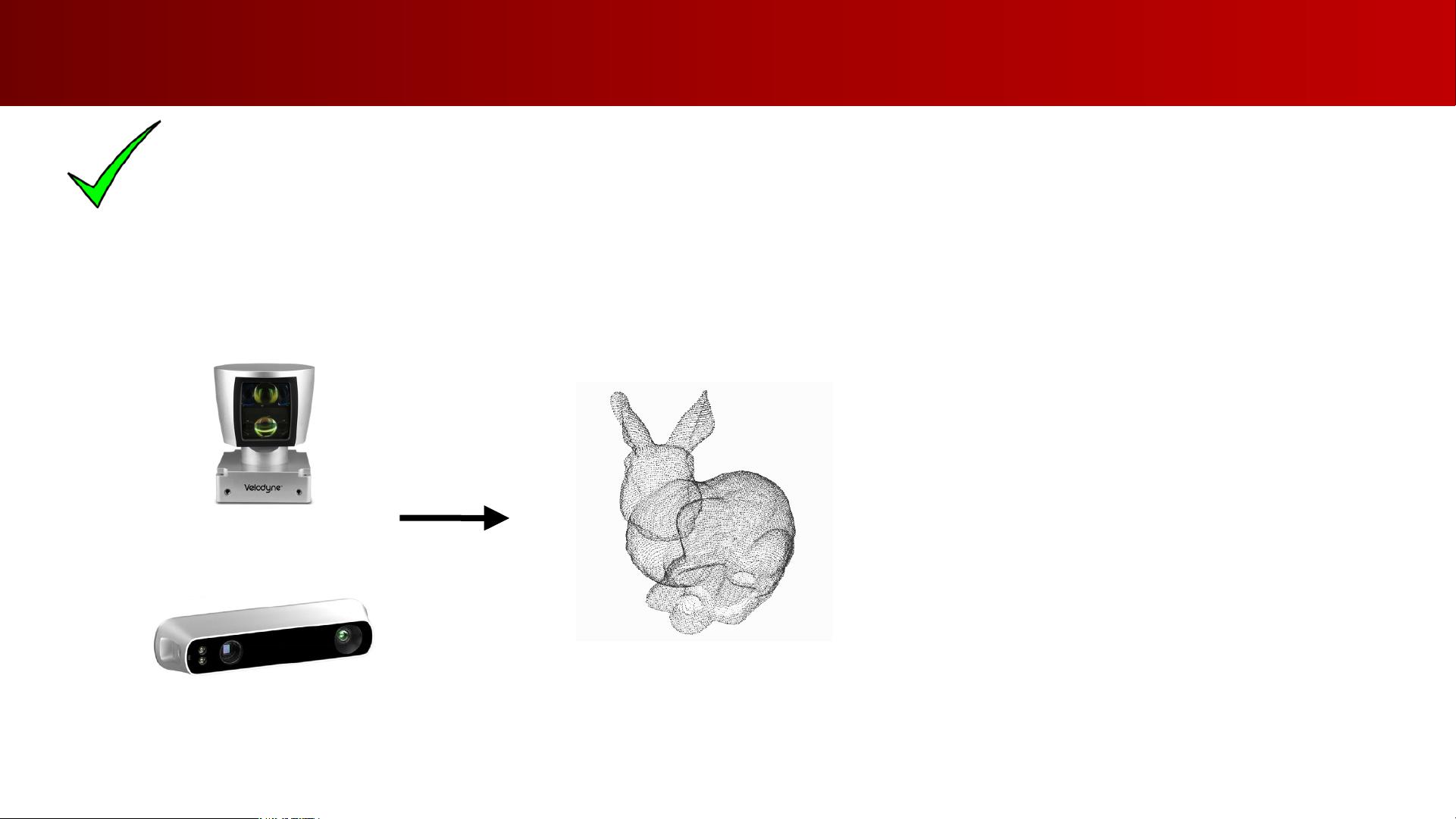
点云简介
点云是一种三维点的集合,通常来自 LiDAR(激光雷达)或其他_DEPTH sensor。点云是原始传感器数据的近似表示,具有无序、无结构的特点。点云数据广泛应用于机器人感知、增强现实、形状设计等领域。
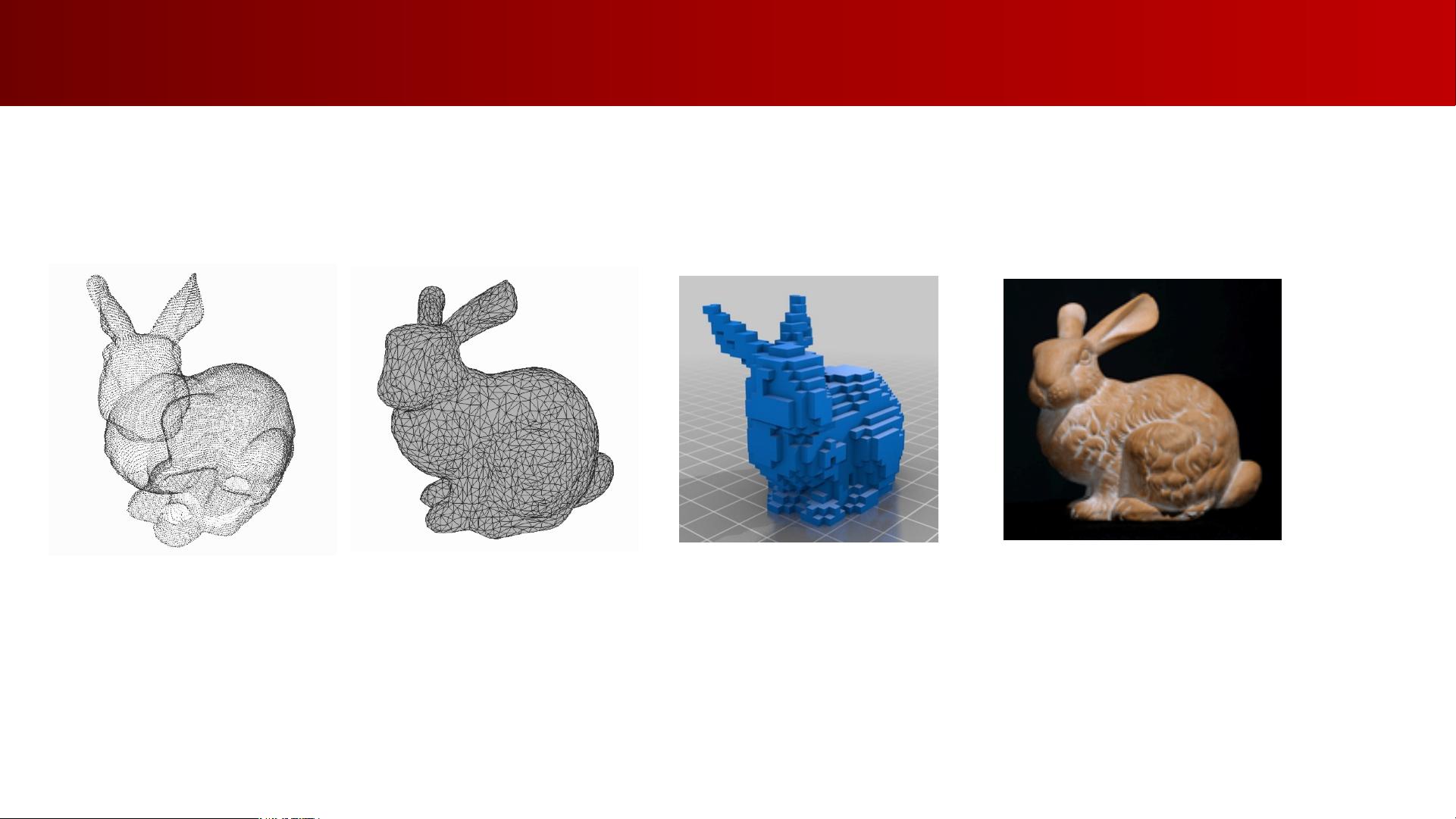
点云特征学习
传统的点云特征学习方法多是手工设计的,针对特定的任务。这些方法将点云转换为其他表示形式,如 voxelization、projection/rendering、2D CNN 等,然后使用深度神经网络进行特征提取。然而,这些方法存在一些缺陷,如忽视了点云的原始结构信息、需要手工设计特征等。
PointNet 概述
PointNet 是一种 end-to-end 的学习框架,直接对点云数据进行学习,实现了点云分类、对象部分分割、语义场景解析等多种任务。PointNet 的关键特点是:
* 直接对点云数据进行学习,无需手工设计特征或转换到其他表示形式。
* 使用 symmetry function 实现点云的不变性,使模型对点云的旋转、平移等几何变换具有不变性。
* 采用 max pooling 实现点云的-down sampling,减少计算复杂度。
PointNet 架构
PointNet 的架构主要由三个部分组成:
* 输入层:直接接受点云数据作为输入。
* 特征提取层:使用 symmetry function 和 max pooling 实现点云特征的学习。
* 输出层:对点云进行分类、分割或其他任务的输出。
PointNet 的挑战
PointNet 需要面临两个主要挑战:
* 点云的不确定性:点云数据的顺序和结构是随机的,模型需要对点云的不确定性具有不变性。
* 几何变换:点云的旋转、平移等几何变换不应该改变分类结果。
PointNet 的应用
PointNet 旨在解决点云分类、对象部分分割、语义场景解析等多种任务,广泛应用于机器人感知、增强现实、形状设计等领域。
PointNet 是一种基于深度学习的点云处理方法,直接对点云数据进行学习,实现了点云分类、对象部分分割、语义场景解析等多种任务。PointNet 的出现标志着点云处理领域的一个重要突破,具有广泛的应用前景。
PointNet: Deep Learning on Point Sets for
3D Classification and Segmentation
Charles R. Qi*
Hao Su*
Kaichun Mo
Leonidas J. Guibas

剩余67页未读,继续阅读
2023-08-22 上传
124 浏览量
2022-03-17 上传
146 浏览量
2023-07-08 上传
105 浏览量
146 浏览量
194 浏览量
173 浏览量
2023-08-12 上传
175 浏览量
178 浏览量
115 浏览量
133 浏览量
资源评论


院土
- 粉丝: 127
- 资源: 3









