时间分配Optimal_Time_Allocation_for_Quadrotor_Trajectory_Generation....
需积分: 15 70 浏览量
2022-09-03
17:19:50
上传
评论
收藏 5.31MB PDF 举报

Optimal Time Allocation for Quadrotor Trajectory Generation
Fei Gao, William Wu, Jie Pan, Boyu Zhou and Shaojie Shen
Abstract— In this paper, we present a framework to do
optimal time allocation for quadrotor trajectory generation.
Using this method, we can generate minimum-time piecewise
polynomial trajectories for quadrotor flights. We decouple the
quadrotor trajectory generation problem into two folds. Firstly
we generate a smooth and safe curve which is parameterized
by a virtual variable. This curve named spatial trajectory is
independent of time and has fixed spatial properties. Then a
mapping function which decides how the quadrotor moves along
the spatial trajectory respecting kinodynamic limits is found by
minimizing total trajectory time. The mapping function maps
the virtual variable to time is named temporal trajectory. We
formulate the minimum-time temporal trajectory generation
problem as a convex program which can be efficiently solved.
We show that the proposed method can corporate with various
types of previous trajectory generation method to obtain the
optimal time allocation. The proposed method is integrated into
a customized light-weight quadrotor platform and is validated
by presenting autonomous flights in indoor and outdoor en-
vironments. We release our code for time optimization as an
open-source ros-package.
I. INTRODUCTION
In recent years, micro aerial vehicles (MAVs), especially
quadrotors, have drawn increasing attention on various ap-
plications. Thanks to their mobility, agility, and flexibility,
quadrotors can fly rapidly and safely through complex envi-
ronments while avoiding collisions. One of the most crucial
issues for quadrotor flights is the motion/path planning,
which coordinates the quadrotor to navigate from a start
point to a target location in cluttered environments. Beyond
the safety requirement, which has been satisfied in many
approaches [1], [6], time optimality and kinodynamic feasi-
bility are also significant issues we consider. On the premise
of satisfying kinodynamic limits, for most applications of
quadrotors, optimality in time means efficiency in operation.
For quadrotor motion planning and trajectory generation,
the piecewise polynomial-based trajectory has been widely
adopted since [3] and [1], because of its superior represen-
tative capability and concise formulation. Although variants
of piecewise polynomial trajectory have been proposed, time
allocation is still a bottleneck for it. We can use the scenario
of a car/quadrotor racing in a sharp turn for illustration.
No matter how high is the speed before entering the sharp
turn, the acceleration of the vehicle has to be bounded while
turning. In this case, a poor time allocation would take
a significantly longer time for passing the sharp turn. In
All authors are with the Department of Electronic and Computer
Engineering, Hong Kong University of Science and Technology, Hong
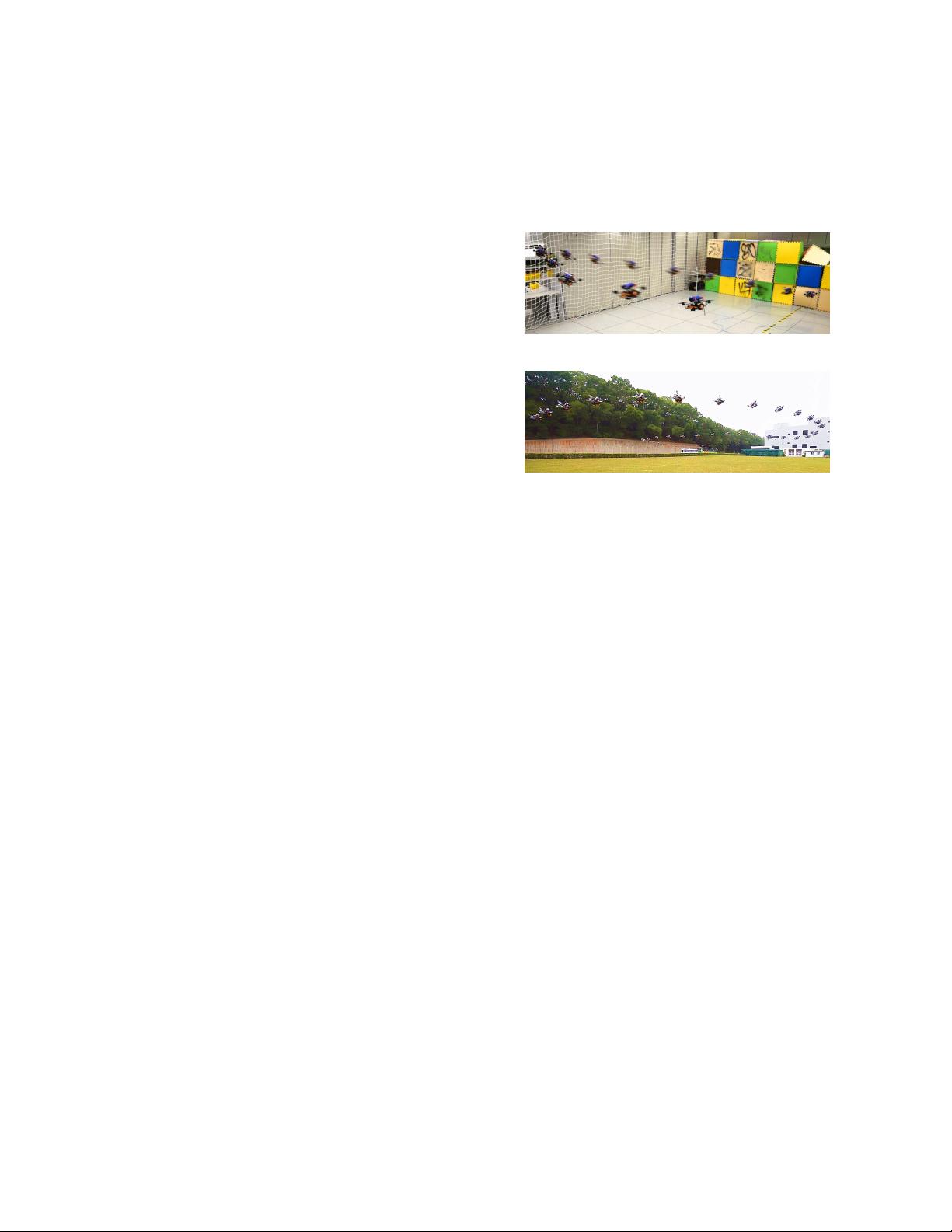
(a) Composite image of the indoor quadrotor flight.
(b) Composite image of the outdoor quadrotor flight.
Fig. 1. Composite images of the quadrotor flying in indoor and outdoor
experimnets. Our quadrotor platform equipped with a monocular camera
and an IMU along with an Intel i7 CPU. We demonstrate fast-speed flights
by using our proposed method in both indoor and outdoor environments.
The video recording experiments is available in the attachment of this paper.
this paper, we present a framework to generate minimum
time trajectories under the constraints of physical limits. The
proposed framework is decoupled into two stages. Firstly
we generate trajectories in the spatial aspect. Instead of
parameterizing the trajectory directly by time, we generate
time independent trajectories in a virtual domain, with fixed
geometric distributions. Secondly, we bridge the spatial tra-
jectory to the temporal information. The relations between
the virtual variable to time variable is found by minimizing
the total flight time globally considering the dynamical
limits. Therefore vehicles with our proposed time allocation
method can pass the sharp turn with minimal time; related
tests are given in Sect. V-C.2.
This work is motivated by the observation that for a
robotics trajectory generation application, most of the cases
the geometrical and temporal information are not necessarily
coupled. For safety consideration, the trajectory should be
wrapped to avoid obstacles [4] [5] or be bounded within
free space [6] [7]. To this end, geometrical properties of
the trajectory are the only concern. On the other side,
for dynamical feasibility consideration, temporal information
of the trajectory, such as velocity and acceleration of the
quadrotor should be bounded within the kinodynamic limits.
In many works, although the kinodynamic is constrained
at the same time with the generation of the geometrical
trajectory [7] [8], it is highly dependent on the time allocation
and is often too conservative to fully utilize the actuators for
high-speed navigations. In this paper, we propose a method
to get the optimal time allocation for quadrotor trajectory
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Madrid, Spain, October 1-5, 2018
978-1-5386-8094-0/18/$31.00 ©2018 IEEE 4715
Authorized licensed use limited to: BEIJING UNIVERSITY OF POST AND TELECOM. Downloaded on September 03,2022 at 07:40:48 UTC from IEEE Xplore. Restrictions apply.






评论0
最新资源