Coping with variability in motion based activity recognition
Matthias Kreil
DFKI GmbH
Kaiserslautern, Germany
matthias.kreil@dfki.de
Bernhard Sick
Intelligent Embedded Systems
University of Kassel, Germany
bsick@uni-kassel.de
Paul Lukowicz
DFKI GmbH / TU
Kaiserslautern, Germany
paul.lukowicz@dfki.de
ABSTRACT
A key issue in the automatic recognition of human activities
with body worn sensors is the variability of human motions
and the huge space of possibilities for executing even fairly
simple actions. In this article we introduce a new algorithm to
address this issue. The core idea is that often even highly vari-
able actions include short more or less invariant parts which
are due to hard physical constraints. The aim is to develop
a method that can identify such invariants and use them to
improve the classification of the respective activities. The
method is meant to be combined with existing classification
approaches in an ensemble like fashion, being applied only to
the classes for which appropriate invariants can be found and
leaving the other classes to be handled by classical methods.
We compare our method’s results to prior publications on two
well known data sets and are able to improve the classifica-
tion in 5 of 23 respectively 4 of 19 classes, in same cases by
a large margin (best case is from 27% to 76% in the first and
from 50% to 64% in the second). In each data set there is
only one class for which we make the recognition worse and
in both cases it is one with poor results to start with and a rel-
atively small decrease (from 54% to 45% in the first and from
65% to 62% in the second). The results are achieved for an
user independent case.
Author Keywords
Activity Recognition, Motif Detection, Segmentation,
Wearable Computing, IMU
ACM Classification Keywords
H.5.4. Pattern Recognition: Applications: Signal processing
INTRODUCTION
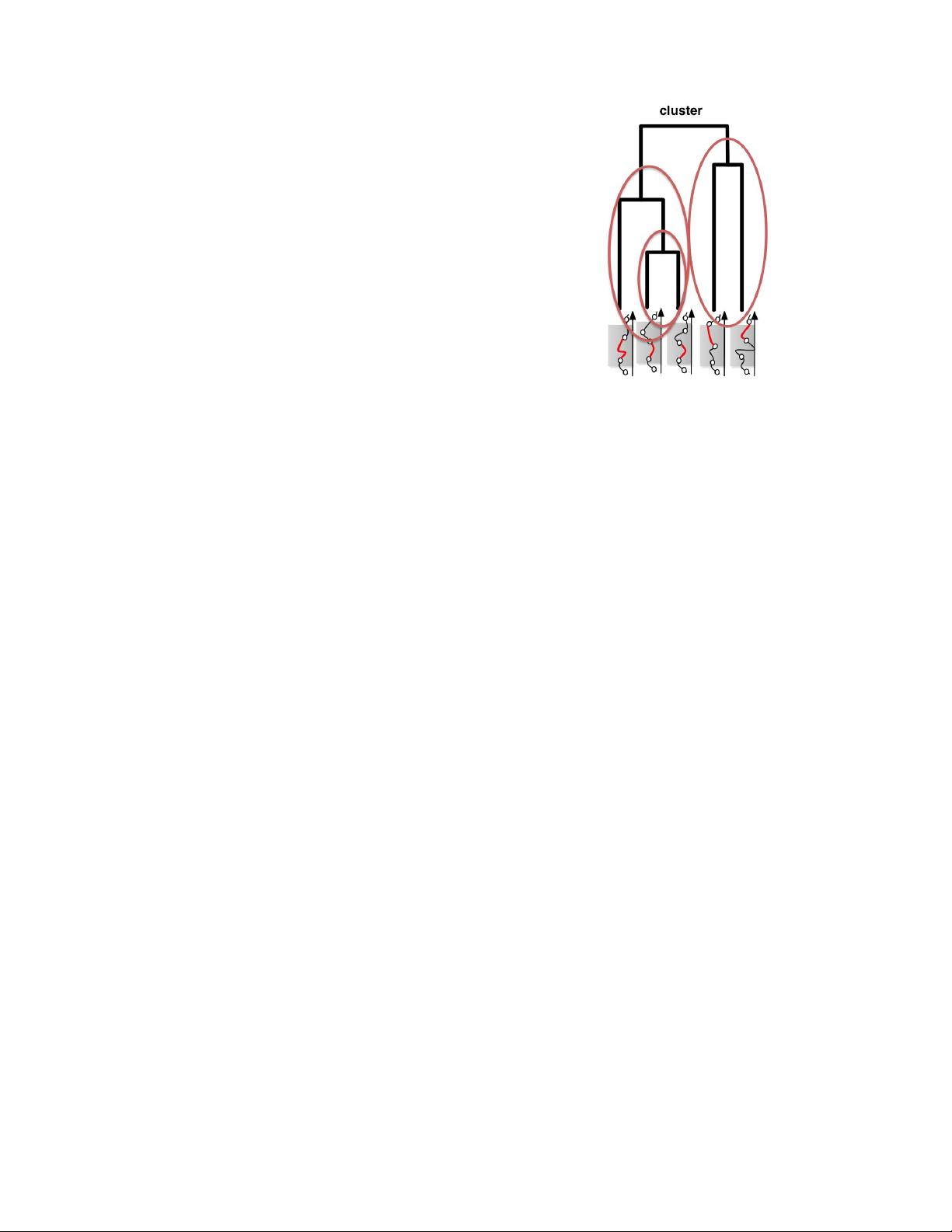
The basic idea behind our work is that many human activities
consist of two parts: one (mostly the larger part) being vari-
able due to inter or intra personal differences and the other be-
ing relatively invariant due to hard physical constraints. Thus,
for example, there are many different ways to hold and insert
a key into a lock, but in the end unlocking involves some sort
of a turning motion (which is the largely invariant part).
Publication rights licensed to ACM. ACM acknowledges that this contribution was
authored or co-authored by an employee, contractor or affiliate of a national govern-
ment. As such, the Government retains a nonexclusive, royalty-free right to publish or
reproduce this article, or to allow others to do so, for Government purposes only.
iWOAR ’16, June 23 - 24, 2016, Rostock, Germany.
Copyright is held by the owner/author(s). Publication rights licensed to ACM.
ACM 978-1-4503-4245-2/16/06....$15.00
DOI: http://dx.doi.org/10.1145/2948963.2948967
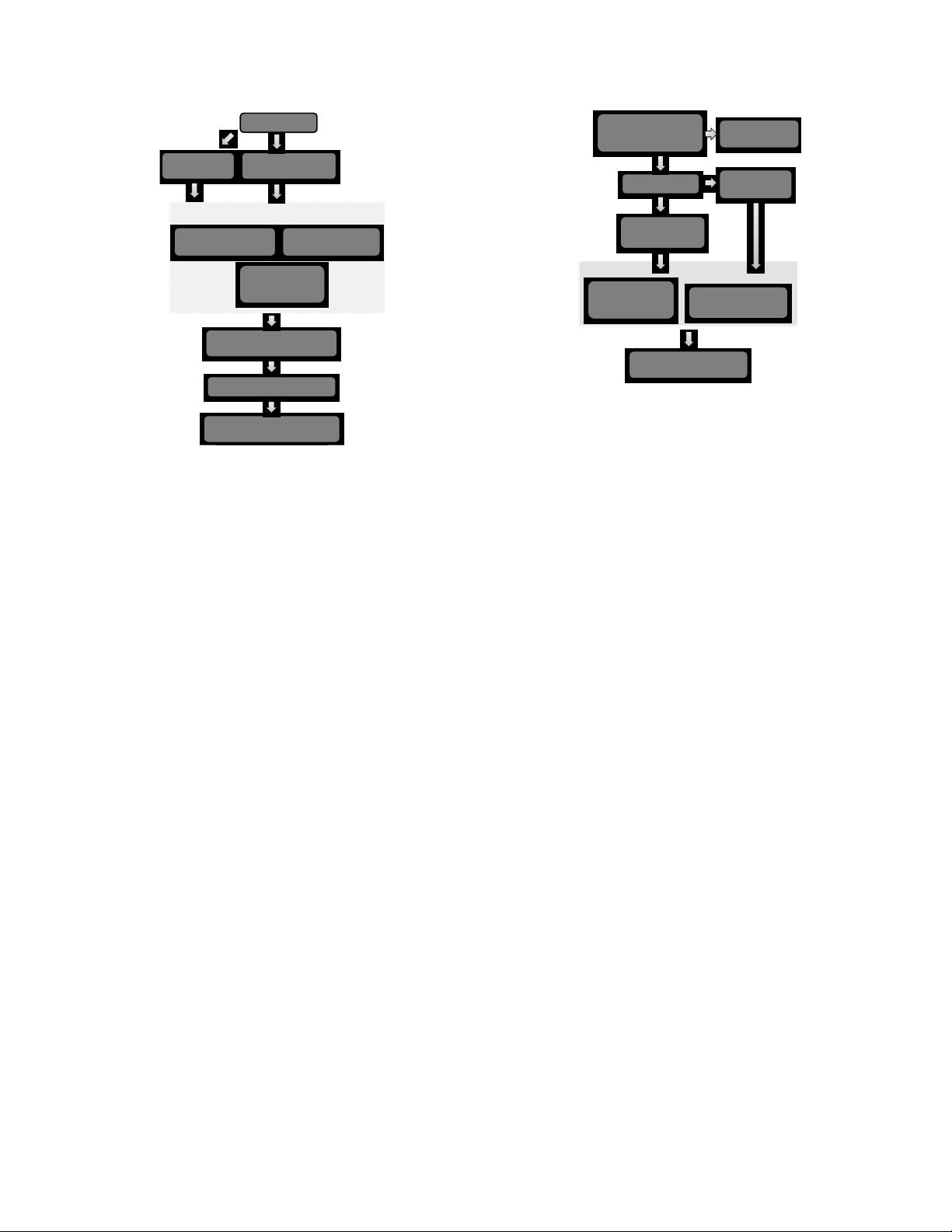
Based on this idea we propose a method that can identify such
invariants in motion related human activities and use them to
improve their automatic recognition from body worn sensors.
The method is meant to be combined with existing classifi-
cation approaches in an ensemble like fashion, being applied
only to the classes for which appropriate invariants can be
found and leaving the other classes to be handled by classi-
cal methods. Which class to handle using our methods and
which to leave to other methods is determined automatically
from the training data sets. We compare our results (includ-
ing the selection of the method to be applied) to previously
published results on two well known data sets. These are the
bicycle repair experiment from [14] and the car workshop
experiment from [17]. Our methods are able to improve the
classification in 5 of 23 respectively 4 of 19 classes, in same
cases by a large margin. In the bycycle data set the best case
improvement is from 27% to 76%, in the car data set the best
case is from 50% to 84%. In each data set there is only one
class for which we worsen the recognition (which means that
the system wrongly decided to opt for the invariants based
method) and in both cases it is one with poor results to start
with and a relatively small decrease (from 54% to 45% in the
first and from 65% to 62% in the second). The results are
achieved for a user independent classification case (training
on a set of users and then testing on a user that the system
has not seen before), which is the hardest activity recognition
task.
RELATED WORK
Activity recognition algorithms usually start with a strategy
to separate the signal data in reasonable units for further pro-
cessing. A straight forward strategy to segment a data stream
is to use a sliding window of a fixed size. This is done by
pushing the window forward by a fixed number of data points
and using the data of each window frame for the next pro-
cessing step in the classification chain, e.g., the feature cal-
culation. This has been implemented in several publications
in the field of activity recognition [1, 2, 5, 10, 16]. An-
other approach to segment time series is to linearly approxi-
mate the signal piecewise while satisfying a predefined error
condition. [11] introduces such an algorithm called Sliding
Window and Bottom-up (SWAB). [18] inspired us to the seg-
mentation strategy used in this publication. They observed
that the movement of the hand slows down when activities
start and end. As a consequence, the variance signal of the
hand’s acceleration data is calculated with a sliding window
of 10 samples. Whenever a minimum in the variance signal
is reached, a new segmentation point is set.