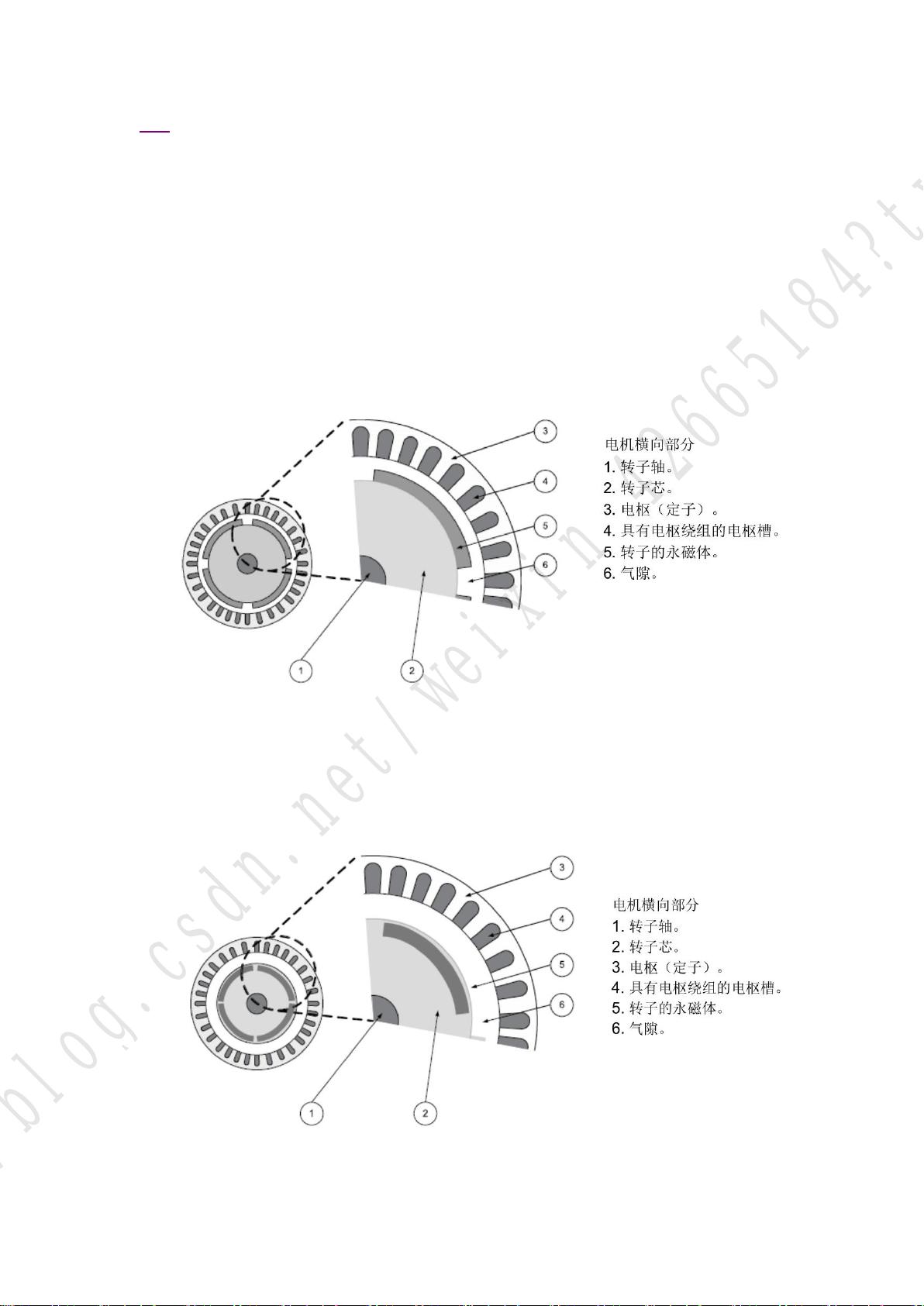
永磁同步电机FOC控制
需积分: 5 189 浏览量
2023-11-13
08:21:00
上传
评论
收藏 3.17MB PDF 举报


目录
1 永磁同步电机 ................................................................................................................................ 2
1.1 永磁同步电机数学模型及常用公式 .................................................................................2
1.1.1 ABC 三相静止坐标系 ............................................................................................... 3
1.1.2
静止坐标系 ...........................................................................................................3
1.1.3 DQ 旋转坐标系 ......................................................................................................... 4
1.2 永磁同步电机参数测量及对控制的影响 .........................................................................7
1.2.1 极对数 ...................................................................................................................... 7
1.2.2 定子电阻 .................................................................................................................. 8
1.2.3 DQ 轴电感 ................................................................................................................. 9
1.2.4 转矩常数和反电动势系数 ......................................................................................9
1.2.5 转动惯量 ................................................................................................................ 11
2 FOC 原理 ........................................................................................................................................12
2.1 FOC 概述 .............................................................................................................................12
2.2 坐标变换 ........................................................................................................................... 13
2.2.1 Clark 变换 ................................................................................................................ 13
2.2.2 Park 变换 ................................................................................................................. 14
2.2.3 PI 控制器及参数设计 .............................................................................................14
2.2.4 Park 逆变换 ............................................................................................................. 15
2.2.5 Clarke 逆变换 .......................................................................................................... 16
2.2.6 SVPWM 调制 ........................................................................................................... 16
2.2.7 谐波注入 SVPWM ...................................................................................................21
*文档是自己根据各种文献总结,不排除存在错误,仅供参考
博客:
https://blog.csdn.net/weixin_42665184?type=blog
【 永 磁 同 步 电 机 FOC 控 制 Simulink 从 零 开 始 建 模 到 代 码 生 成 开 发 板 演 示 1 】
https://www.bilibili.com/video/BV1VP411o7bE/?share_source=copy_web&vd_source=805c0ff53
a45f7c315854043a21b24d9
开发板地址:
https://shop148374443.taobao.com/index.htm?spm=2013.1.w5002-13354255014.2.5747392eKl
https://blog.csdn.net/weixin_42665184?type=blog
剩余22页未读,继续阅读
资源评论














