# Tianracer
[中文版说明](https://github.com/tianbot/tianracer/blob/master/README_CN.md)
[TianRacer详细中文操作手册](http://doc.tianbot.com/tianracer)
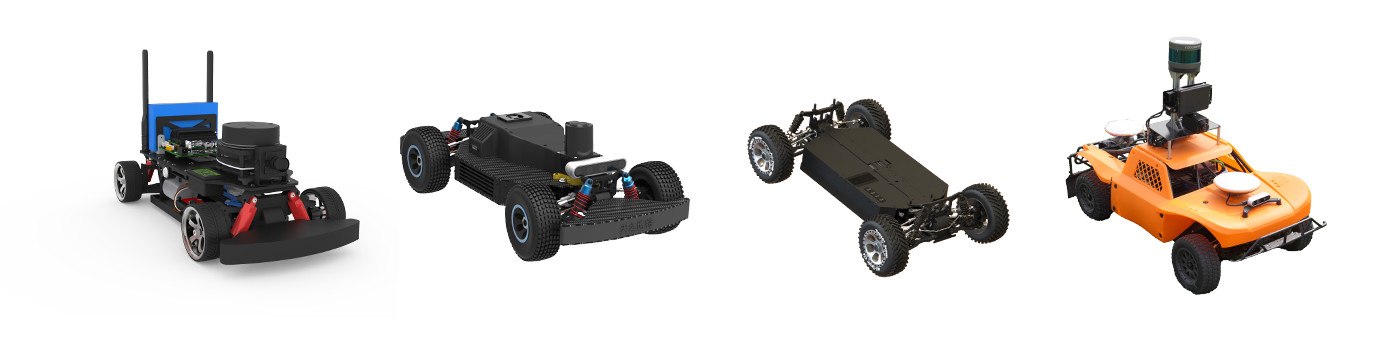
Tianracer is a series of low-cost autonomous vehicles ranging in size from 1:10 to 1:5, controlled in a closed-loop system, allowing them to follow input commands more faithfully. All Tianracer models are equipped with NVIDIA development boards, including Jetson Nano, Jetson TX2, Xavier, Orin, and more. The basic version of Tianracer can reach a maximum speed of 3m/s, while the pro version can achieve speeds up to 10m/s.
## Introduction
[TianRacer ROS Wiki](https://wiki.ros.org/tianracer)
Our objective is to develop an affordable autonomous racing car, the Tianracer, with capabilities extending beyond basic mapping, localization, and navigation. It will feature advanced functionalities such as object detection, traffic light detection, and lane keeping. Currently, Tianracer builds upon and enhances the AI capabilities inherited from Jetracer.
## Purchase from Tianbot Official Taobao Store
The Tianracer Nano version is a standard platform with all the hardware and software installed, a ready-to-go racing car.
[点击这里进入淘宝购买或咨询客服: Purchase from Taobao:](https://item.taobao.com/item.htm?id=564703378940)
## Appreciation to HyphaROS RaceCar and Lord-Z
We developed the Tianracer based on the Hypha racecar. Please check out the original authors' repo for more details.
https://github.com/Hypha-ROS/hypharos_racecar
Developer:
* HaoChih, LIN
* KaiChun, WU
Tianracer gazebo simulation is imported from https://github.com/Lord-Z/ackermann_gazebo
Developer:
* Yuxing, ZHANG
## Customization
Speed: 3m/s - 10m/s
Control:closed-loop speed control
Computer: Nvidia Jetson Nano/TX/NX/Orin Developer Kit
Chassis: BLDC Motor + TianBoard Mini + Servo
Lidar: Slamtec / Osight / Richbeam / Livox
Camera: 1080P Fisheye Undistorted USB3.0 / RGBD Camera
Remote Controller: DJI DT7
Battery: LiPo
# Instructions
## Installation
```
cd ~/catkin_ws/src/
git clone https://github.com/tianbot/tianracer.git
cd ~/catkin_ws && catkin_make
```
## Simulation
Tianracer can be simulated in [F1tenth Simulator](https://github.com/f1tenth/f1tenth_simulator). Install the simulator first.
```
cd ~/catkin_ws/src/
git clone https://github.com/f1tenth/f1tenth_simulator.git
cd ~/catkin_ws && catkin_make
```
Simulate Tianracer
```
roslaunch tianracer_navigation simulator_wall_following.launch
```
## Interfacing
Tianracer can be brought up all at once, or separately.
```
roslaunch tianracer_bringup tianracer_bringup.launch
```
### Tianracer Base
```
roslaunch tianracer_core tianracer_core.launch
```
### Lidar
```
roslaunch tianracer_bringup lidar.launch
```
### RGBD Camera (if applicable)
```
roslaunch tianracer_bringup rgbd_camera.launch
```
### USB Camera
```
roslaunch tianracer_bringup usb_cam.launch
```
### GPS (if applicable)
```
roslaunch tianracer_bringup gps.launch
```
## Mapping
After bringing up the Tianracer, we provide three methods to perform slam for 2D laser.
### GMapping
```
roslaunch tianracer_slam tianracer_gmapping.launch
```
### HectorSLAM
```
roslaunch tianracer_slam tianracer_hector.launch
```
### Cartographer
```
roslaunch tianracer_slam tianracer_cartographer.launch
```
### Save the Map
Map will be saved as tianbot_office in tianracer_slam/maps/
```
roslaunch tianracer_slam map_save.launch
```
## Navigation
After saving the map, the map can be used to perform navigation.
```
roslaunch tianracer_navigation tianracer_teb_nav.launch
```
Configure running ROS across multiple machines, then launch RViz in a PC with a display
```
roslaunch tianracer_rviz view_teb_planner.launch
```
# License: GPL v3
睿抗ROS机器人虚拟仿真挑战赛-天驰无人竞速车python源码+文档说明+安装说明+参数+建图

版权申诉
 睿抗ROS机器人虚拟仿真挑战赛-天驰无人竞速车python源码+文档说明+安装说明+参数+建图 (268个子文件)
睿抗ROS机器人虚拟仿真挑战赛-天驰无人竞速车python源码+文档说明+安装说明+参数+建图 (268个子文件)  model.config 310B L1_controller_v2.cpp 13KB tianboard.cpp 10KB serial.cpp 8KB main.cpp 306B base_link_iflytek.dae 12KB base_link.dae 12KB 99.default_tianracer.sh.em 2KB racecar.gazebo 6KB racecar.urdf.gazebo 6KB .gitattributes 28B .gitignore 558B .gitignore 294B .gitignore 25B serial.h 2KB tianboard.h 1KB protocol.h 1KB interactive_regression_tianracer.ipynb 16KB road_following_tianracer.ipynb 6KB basic_motion_tianracer.ipynb 5KB tianracer_teb_nav_2.launch 6KB tianracer_teb_nav.launch 3KB demo_tianracer_teb_nav.launch 3KB simulation.launch 3KB tianracer_core_2.launch 2KB tianracer_hector_2.launch 2KB tianracer_hector.launch 2KB tianracer_gmapping_2.launch 2KB spawn_with_rviz.launch 2KB tianracer_gmapping.launch 2KB tianracer_on_racetrack.launch 2KB spawn_tianracer.launch 2KB tianracer_control.launch 2KB tianracer_3d_cartographer.launch 1KB open_map_teb.launch 1KB tianracer_cartographer.launch 1KB tianracer_l1_nav.launch 1KB demo_sim_two_tianracer.launch 1KB tianracer_cartographer_gazebo.launch 1KB tianracer_core.launch 1KB tianracer_tf.launch 1005B test_gmapping.launch 1002B tianracer_bringup2.launch 963B joystick_teleop.launch 884B lidar.launch 846B map_save_2.launch 678B map_save.launch 669B tianracer_bringup.launch 627B navigation.launch 604B tianracer_description.launch 602B spawn_model.launch 595B usb_cam.launch 546B tianracer_multi_goal.launch 499B rgbd_camera.launch 453B view_image.launch 420B bridge.launch 372B teleop.launch 369B closed_map.launch 349B open_map.launch 347B simulator_wall_following.launch 331B gps.launch 306B click_waypoint.launch 291B view_mapping_2.launch 238B view_teb_planner_2.launch 237B view_mapping.launch 236B view_teb_planner.launch 235B view_lidar.launch 234B view_rgbd_camera.launch 234B view_amcl.launch 233B view_odom.launch 233B view_imu.launch 232B view_cartographer.launch 227B tianracer_gmapping.launch 226B follow_the_gap.launch 205B test_tianracer_joy_control.launch 195B view_robot_model.launch 148B LICENSE 34KB LICENSE 7KB 3d_points.lua 2KB 2d_scan.lua 2KB README.md 4KB README_CN.md 3KB README.md 70B nmea_serial_driver 3KB nmea_socket_driver 4KB nmea_topic_driver 2KB nmea_topic_serial_reader 2KB room_mini.pgm 3.75MB tianracer_racetrack.pgm 957KB
model.config 310B L1_controller_v2.cpp 13KB tianboard.cpp 10KB serial.cpp 8KB main.cpp 306B base_link_iflytek.dae 12KB base_link.dae 12KB 99.default_tianracer.sh.em 2KB racecar.gazebo 6KB racecar.urdf.gazebo 6KB .gitattributes 28B .gitignore 558B .gitignore 294B .gitignore 25B serial.h 2KB tianboard.h 1KB protocol.h 1KB interactive_regression_tianracer.ipynb 16KB road_following_tianracer.ipynb 6KB basic_motion_tianracer.ipynb 5KB tianracer_teb_nav_2.launch 6KB tianracer_teb_nav.launch 3KB demo_tianracer_teb_nav.launch 3KB simulation.launch 3KB tianracer_core_2.launch 2KB tianracer_hector_2.launch 2KB tianracer_hector.launch 2KB tianracer_gmapping_2.launch 2KB spawn_with_rviz.launch 2KB tianracer_gmapping.launch 2KB tianracer_on_racetrack.launch 2KB spawn_tianracer.launch 2KB tianracer_control.launch 2KB tianracer_3d_cartographer.launch 1KB open_map_teb.launch 1KB tianracer_cartographer.launch 1KB tianracer_l1_nav.launch 1KB demo_sim_two_tianracer.launch 1KB tianracer_cartographer_gazebo.launch 1KB tianracer_core.launch 1KB tianracer_tf.launch 1005B test_gmapping.launch 1002B tianracer_bringup2.launch 963B joystick_teleop.launch 884B lidar.launch 846B map_save_2.launch 678B map_save.launch 669B tianracer_bringup.launch 627B navigation.launch 604B tianracer_description.launch 602B spawn_model.launch 595B usb_cam.launch 546B tianracer_multi_goal.launch 499B rgbd_camera.launch 453B view_image.launch 420B bridge.launch 372B teleop.launch 369B closed_map.launch 349B open_map.launch 347B simulator_wall_following.launch 331B gps.launch 306B click_waypoint.launch 291B view_mapping_2.launch 238B view_teb_planner_2.launch 237B view_mapping.launch 236B view_teb_planner.launch 235B view_lidar.launch 234B view_rgbd_camera.launch 234B view_amcl.launch 233B view_odom.launch 233B view_imu.launch 232B view_cartographer.launch 227B tianracer_gmapping.launch 226B follow_the_gap.launch 205B test_tianracer_joy_control.launch 195B view_robot_model.launch 148B LICENSE 34KB LICENSE 7KB 3d_points.lua 2KB 2d_scan.lua 2KB README.md 4KB README_CN.md 3KB README.md 70B nmea_serial_driver 3KB nmea_socket_driver 4KB nmea_topic_driver 2KB nmea_topic_serial_reader 2KB room_mini.pgm 3.75MB tianracer_racetrack.pgm 957KB aa3_iflytek.png 168KB aa3.png 124KB aa2_iflytek.png 118KB run_in_closed_map_obstacle.png 108KB closed_map_no_obstacle.png 101KB closed_map_obstacle.png 100KB open_map_no_obstacle_5_2.png 88KB TIANRACER.png 66KB driver.py 11KB follow_the_gap.py 6KB upload.py 6KB
aa3_iflytek.png 168KB aa3.png 124KB aa2_iflytek.png 118KB run_in_closed_map_obstacle.png 108KB closed_map_no_obstacle.png 101KB closed_map_obstacle.png 100KB open_map_no_obstacle_5_2.png 88KB TIANRACER.png 66KB driver.py 11KB follow_the_gap.py 6KB upload.py 6KB共 268 条
- 1
- 2
- 3
资源评论

 carbon476662024-06-02支持这个资源,内容详细,主要是能解决当下的问题,感谢大佬分享~
carbon476662024-06-02支持这个资源,内容详细,主要是能解决当下的问题,感谢大佬分享~- akywlker2024-05-15这个资源对我启发很大,受益匪浅,学到了很多,谢谢分享~












