
2 双轮平衡车的系统结构分析
双轮平衡车是一个看似结构简单,实则十分复杂的机电一体化系统,其硬件结构包括
机械部分和电系统部分,要控制一个控制对象首先要对控制对象的状态信息实时检测,本
章对机器人的硬件结构和各种传感器做了详细的介绍。
2.1 双轮平衡车的系统整体设计
双轮平衡车对结构有更高的要求,车身应该做到尽量的对称,元器件的放置尽可能的
靠近车轴承,整个车的中心应该位于轴承上方并且尽可能靠近。系统整体结构组建的对称
与否会对整个系统的控制产生重要影响,如果结构对称,会更容易控制使系统平衡,反之,
结构对称性不好,则会导致软件算法复杂度增加,甚至是双轮平衡车系统不能控制达到自
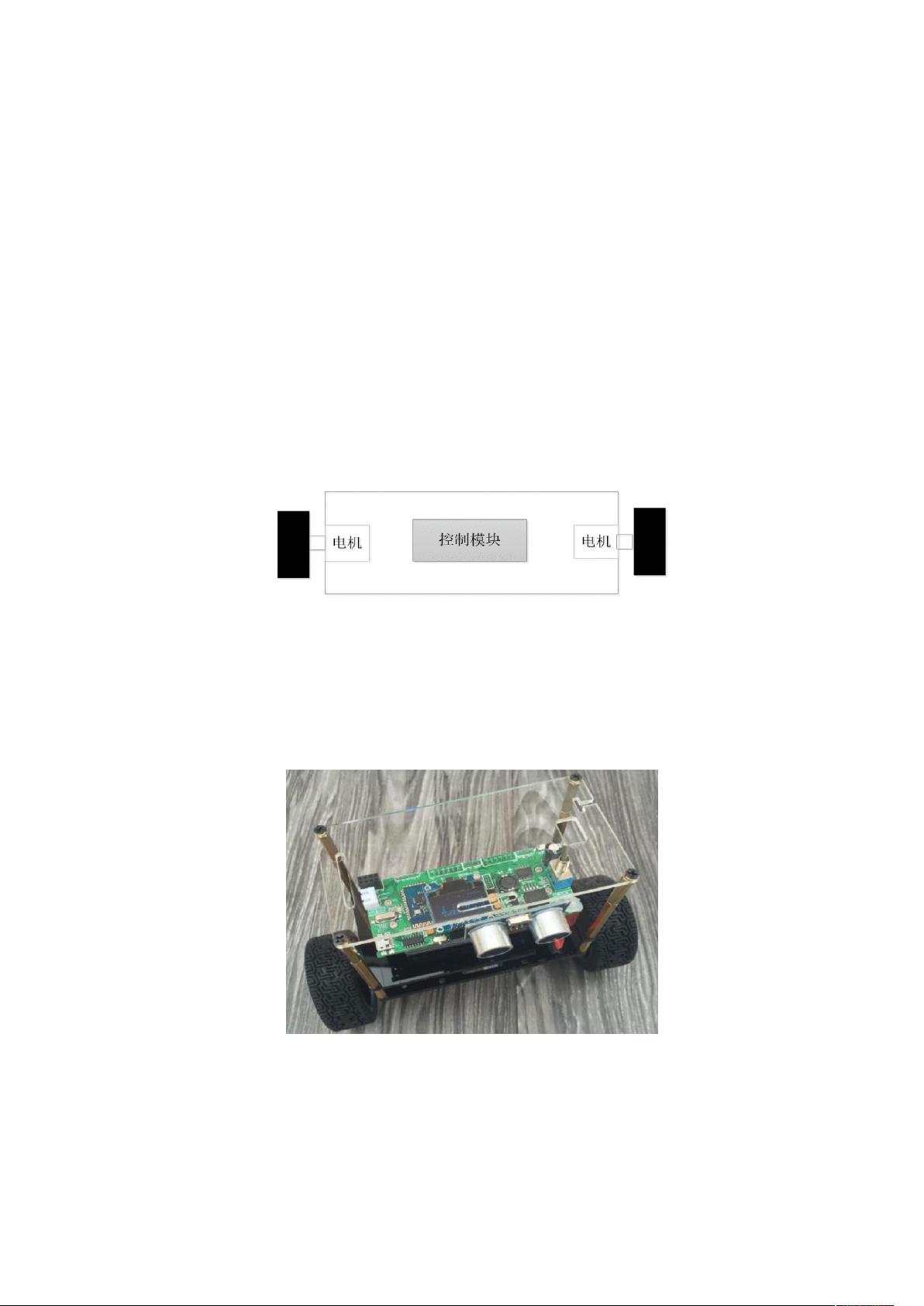
平衡。本文的双轮平衡车结构如图 2.1。
图 2.1
从图中可以看到系统的各个模块全部分布在两轮间轴承上面,控制模块位于小车中间,
这样更利于小车处于动态平衡位置,姿态传感器采集的车身状态的信息也能更精确。本文
搭建的双轮平衡车实物图如图 2.2。
图 2.2
系统总体设计框图和实物图如图 2.3 所示,自动平衡车系统主要由陀螺仪 MPU6050、
直流电机驱动器 TB6612FNG、控制器 STM32F103C8T6 和带编码器的直流电机组成。小
车系统采用两块 7.5V 锂电池串联,利用 LM2578 和 LM2576 分别把串联电压转换为 12 V
和 5 V 电压给系统供电。
资源评论














