pybullet guide book
需积分: 50 176 浏览量
2022-04-04
20:14:37
上传
评论
收藏 1.41MB PDF 举报


PyBullet
Quickstart Guide
Erwin Coumans, Yunfei Bai, 2017/2018
Visit the forums.
Introduction 2
Hello pybullet World 3
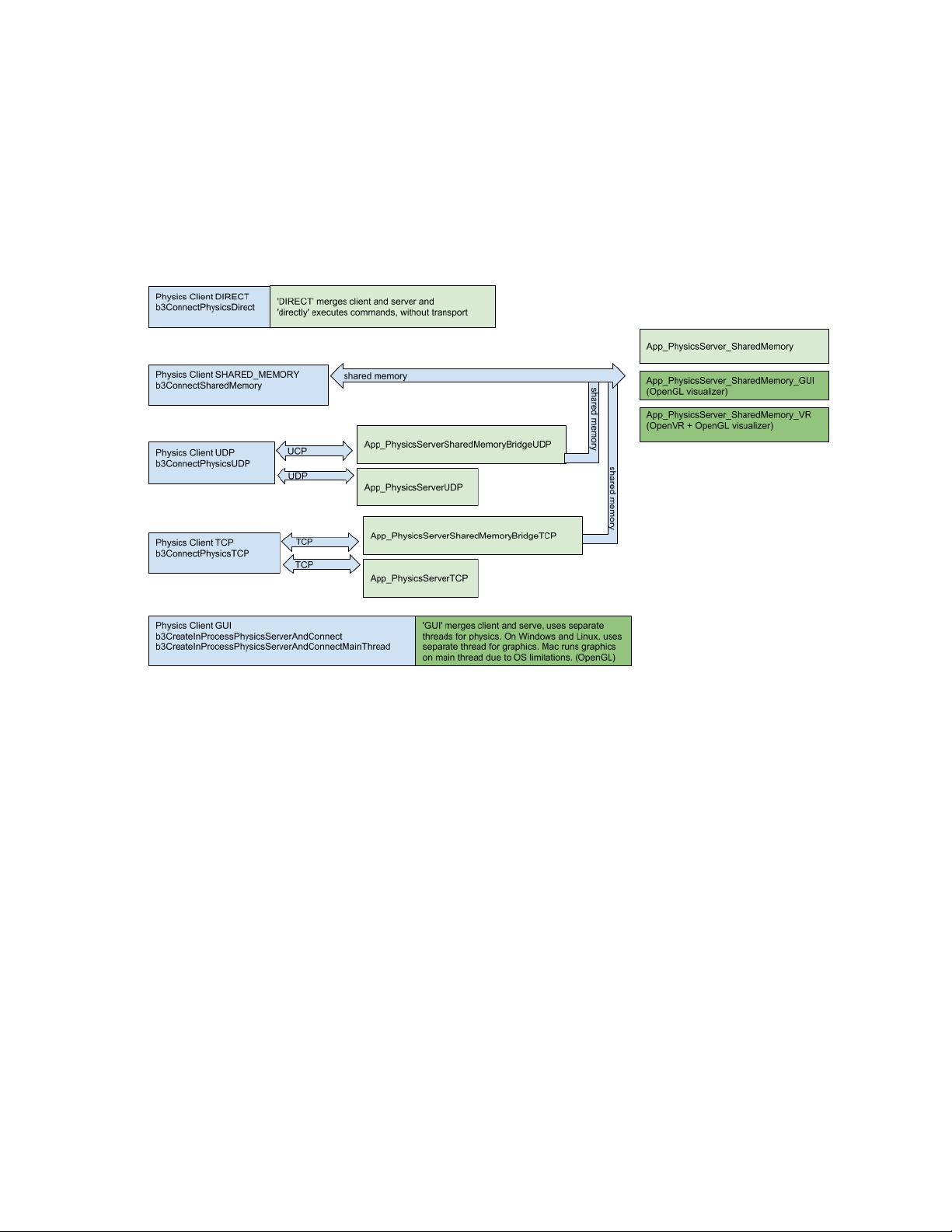
connect, disconnect 3
setGravity 7
loadURDF, loadSDF, loadMJCF 7
saveWorld 9
saveState, saveBullet, restoreState 9
createCollisionShape/VisualShape 10
createMultiBody 11
stepSimulation 13
setRealTimeSimulation 13
getBasePositionAndOrientation 14
resetBasePositionAndOrientation 14
Transforms: Position and Orientation 15
getAPIVersion 16
Controlling a robot 16
Base, Joints, Links 16
getNumJoints, getJointInfo 17
setJointMotorControl2/Array 18
getJointState(s), resetJointState 21
enableJointForceTorqueSensor 22
getLinkState 22
getBaseVelocity, resetBaseVelocity 24
applyExternalForce/Torque 25
getNumBodies, getBodyInfo,
getBodyUniqueId, removeBody 25
createConstraint, removeConstraint,
changeConstraint 26
getNumConstraints,
getConstraintUniqueId 27
getConstraintInfo/State 28
getDynamicsInfo/changeDynamics 28
setTimeStep 30
setPhysicsEngineParameter 30
resetSimulation 32
startStateLogging/stopStateLogging 32
Synthetic Camera Rendering 34
computeViewMatrix 34
computeViewMatrixFromYawPitchRoll
35
computeProjectionMatrix 35
computeProjectionMatrixFOV 35
getCameraImage 36
getVisualShapeData 37
changeVisualShape, loadTexture 38
Collision Detection Queries 39
getOverlappingObjects, getAABB 39
getContactPoints, getClosestPoints 40
rayTest, rayTestBatch 41
getCollisionShapeData 42
Inverse Dynamics, Kinematics 43
calculateInverseDynamics 43
calculateJacobian, MassMatrix 43
calculateInverseKinematics 45
Reinforcement Learning Gym Envs 46
Environments and Data 46
Train and Enjoy: DQN, PPO, ES 49
Virtual Reality 52
getVREvents,setVRCameraState 52
Debug GUI, Lines, Text, Parameters 54
addUserDebugLine, Text 54
addUserDebugParameter 55
setDebugObjectColor 56
configureDebugVisualizer 57
get/resetDebugVisualizerCamera 57
getKeyboardEvents, getMouseEvents 58
Build and install pybullet 59
Support, Tips, Citation 62



剩余63页未读,继续阅读













评论0