关于摄像头自动对焦校准


Chapter 1
CAMERA CALIBRATION
Camera calibration is a necessary step in 3D computer vision in order to extract
metric information from 2D images. It has been studied extensively in computer vi-
sion and photogrammetry, and even recently new techniques have been proposed. In
this chapter, we review the techniques prop osed in the literature include those using
3D apparatus (two or three planes orthogonal to each other, or a plane undergoing
a pure translation, etc.), 2D objects (planar patterns undergoing unknown mo-
tions), 1D objects (wand with dots) and unknown scene points in the environment
(self-calibration). The focus is on presenting these techniques within a consistent
framework.
1.1 Introduction
Camera calibration is a necessary step in 3D computer vision in order to extract
metric information from 2D images. Much work has been done, starting in the
photogrammetry community (see [3, 6] to cite a few), and more recently in computer
vision ([12, 11, 33, 10, 37, 35, 22, 9] to cite a few). According to the dimension of the
calibration objects, we can classify those techniques roughly into three categories.
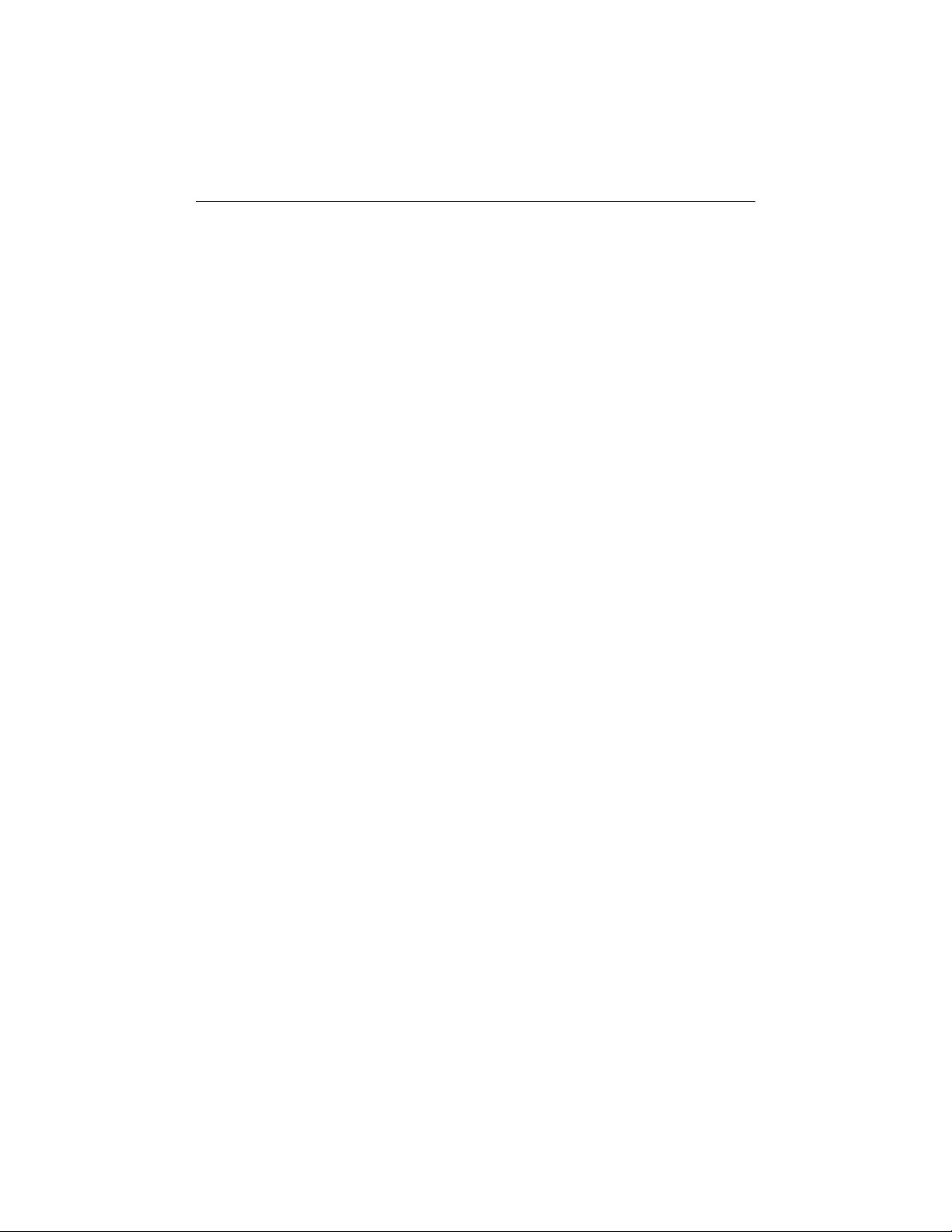
3D reference object based calibration. Camera calibration is performed by ob-
serving a calibration object whose geometry in 3-D space is known with very
good precision. Calibration can be done very efficiently [8]. The calibra-
tion object usually consists of two or three planes orthogonal to each other.
Sometimes, a plane undergoing a precisely known translation is also used [33],
which equivalently provides 3D reference points. This approach requires an
expensive calibration apparatus and an elab orate setup.
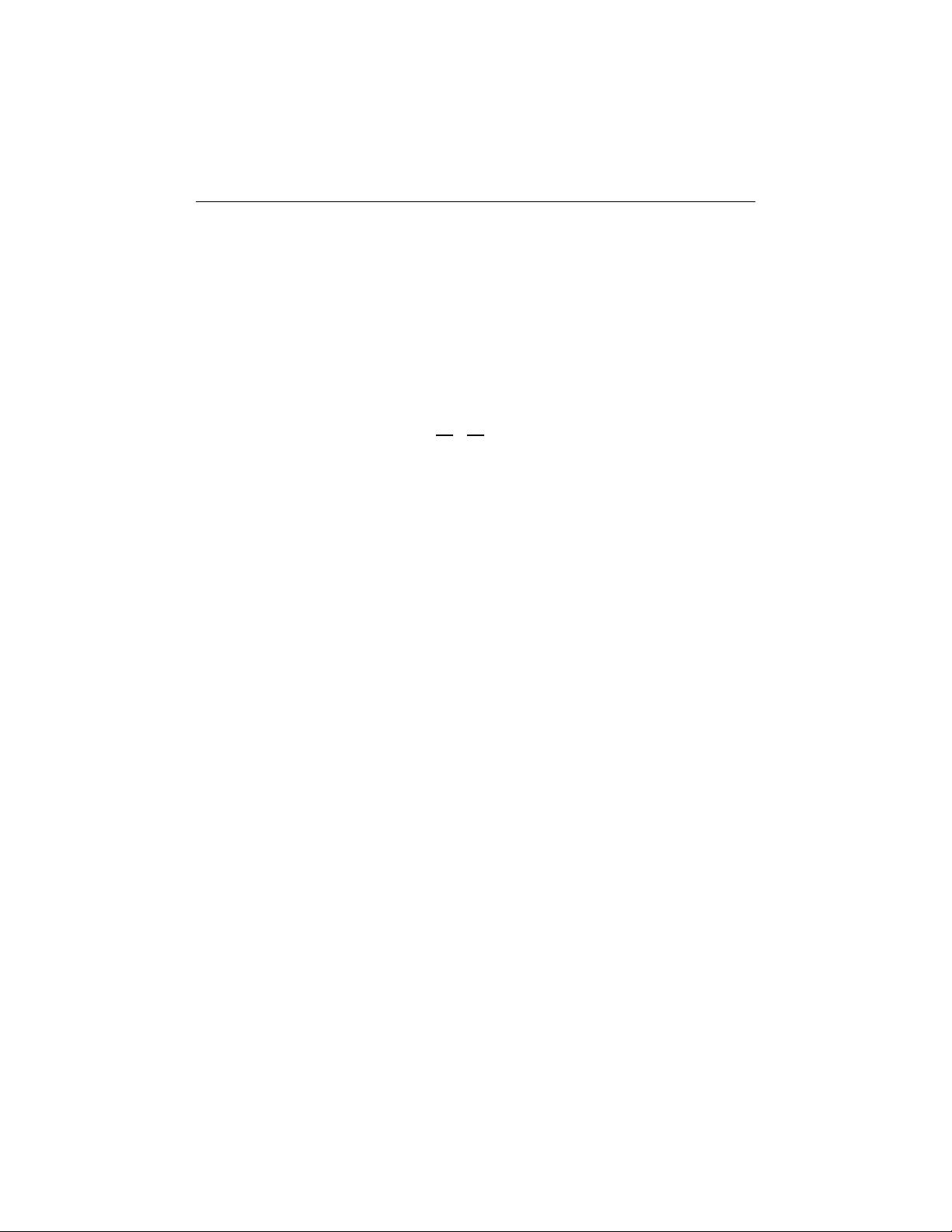
2D plane based calibration. Techniques in this category requires to observe a
planar pattern shown at a few different orientations [42, 31]. Different from
Tsai’s technique [33], the knowledge of the plane motion is not necessary.
Because almost anyone can make such a calibration pattern by him/her-self,
the setup is easier for camera calibration.
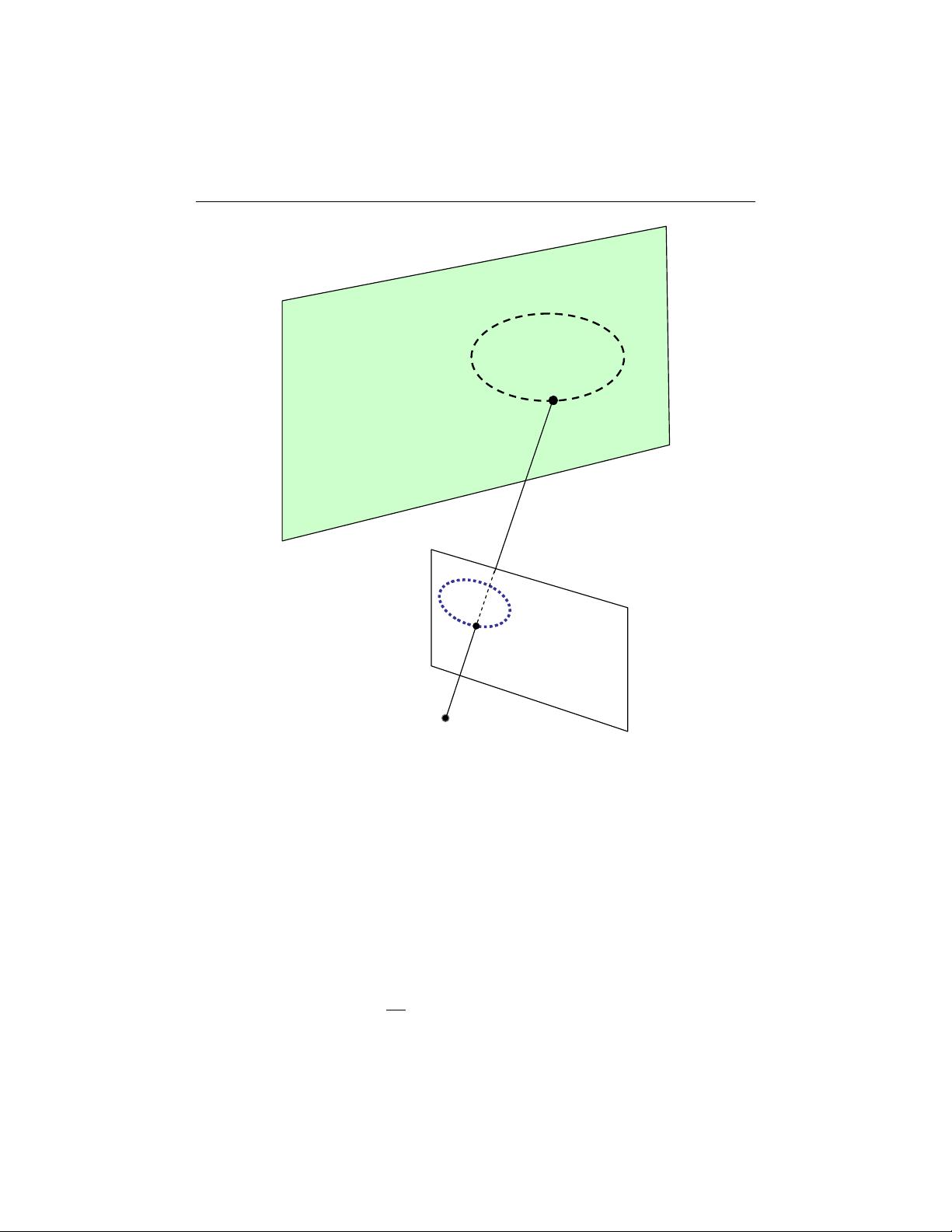
1D line based calibration. Calibration objects used in this category are com-
posed of a set of collinear points [44]. As will be shown, a camera can be
1
Z. Zhang, "Camera Calibration", Chapter 2, pages 4-43,
in G. Medioni and S.B. Kang, eds., Emerging Topics in Computer Vision,
Prentice Hall Professional Technical Reference, 2004.
剩余36页未读,继续阅读
资源评论

 镁锌2017-03-22不是Autofocus校准,是张氏标定
镁锌2017-03-22不是Autofocus校准,是张氏标定











