实验五:有穷自动机的确定化
一:要求
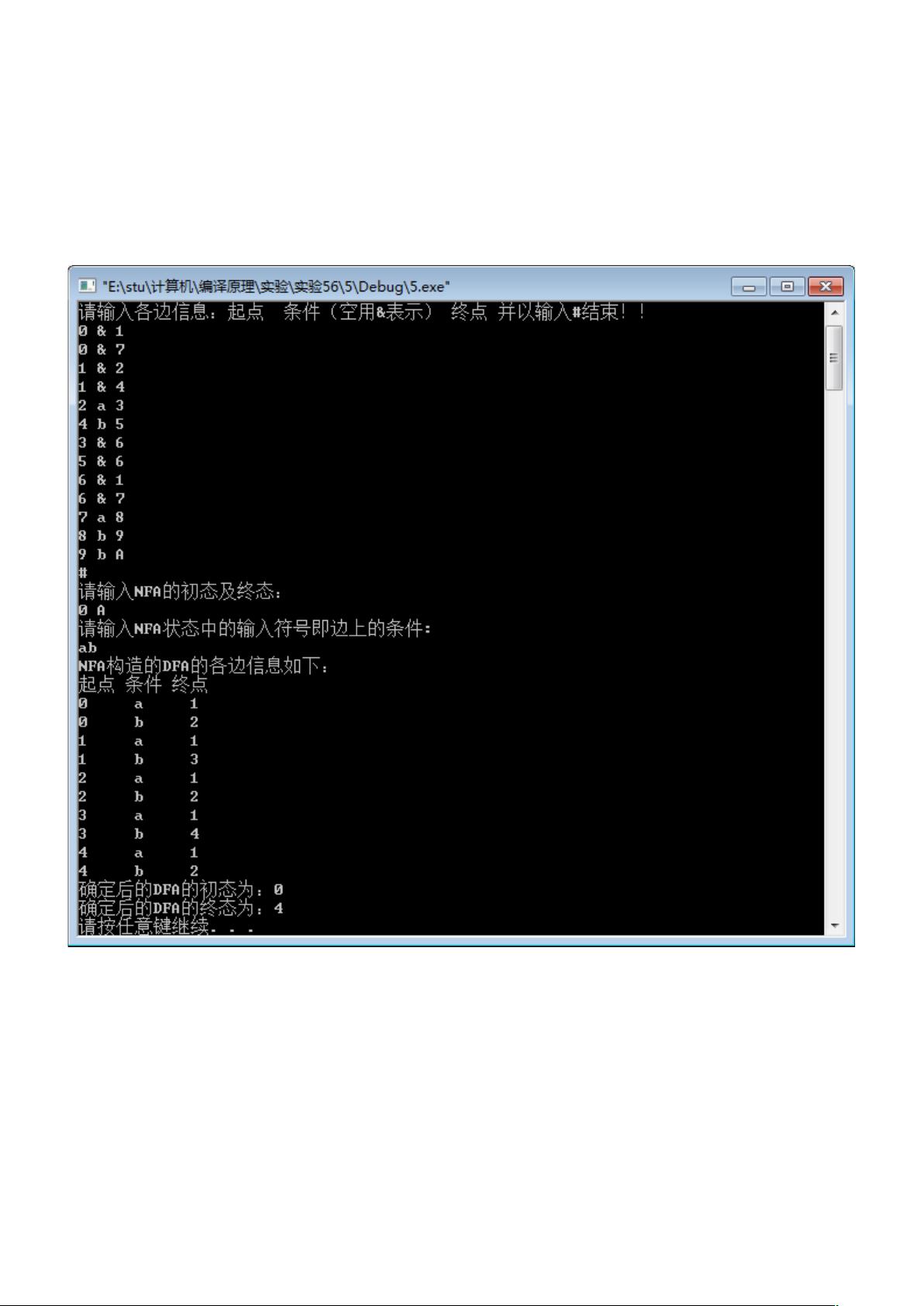
1.输入: 非确定有限(穷)状态自动机。
2.输出: 确定化的有限(穷)状态自动
二:实验目的
1. 熟练掌握 DFA 及 NFA 的定义及有关概念。
2. 理解并掌握确定的有穷自动机的化简等算法。
三:实验原理
1.由定义可见,不确定有限自动机 NFA 与确定有限自动机 DFA 的主要区别是:
(1)NFA 的初始状态 S 为一个状态集,即允许有多个初始状态;
(2)NFA 中允许状态在某输出边上有相同的符号,即对同一个输入符号可以有
多个后继状态。即 DFA 中的 F 是单值函数,而 NFA 中的 F 是多值函数。
2. NFA 确定化为 DFA
同一个字符串 α 可以由多条通路产生,而在实际应用中,作为描述控制过程的
自动机,通常都是确定有限自动机 DFA,因此这就需要将不确定有限自动机转
换成等价的确定有限自动机,这个过程称为不确定有限自动机的确定化,即
NFA 确定化为 DFA。
下面介绍一种 NFA 的确定化算法,这种算法称为子集法:
(1) 若 NFA 的全部初态为 S1,S2,…,Sn,则令 DFA 的初态为:
S=[S1,S2,…,Sn],
其中方括号用来表示若干个状态构成的某一状态。
(2) 设 DFA 的状态集 K 中有一状态为[Si,Si+1,…,Sj],若对某符号 a∈∑,
在 NFA 中有 F({ Si,Si+1,…,Sj },a)={ Si’,Si+1’,…,Sk’ }
则令 F({ Si,Si+1,…,Sj },a)={ Si’,Si+1’,…,Sk’ }为 DFA 的一个转换函数。
若[ Si’,Si+1’,…,Sk‘ ]不在 K 中,则将其作为新的状态加入到 K 中。
(3) 重复第 2 步,直到 K 中不再有新的状态加入为止。
(4) 上面得到的所有状态构成 DFA 的状态集 K,转换函数构成 DFA 的 F,DFA
的字母表仍然是 NFA 的字母表∑。
(5) DFA 中凡是含有 NFA 终态的状态都是 DFA 的终态。
3. NFA 确定化的实质是以原有状态集上的子集作为 DFA 上的一个状态,将原状
态间的转换为该子集间的转换,从而把不确定有限自动机确定化。经过确定化
后,状态数可能增加,而且可能出现一些等价状态,这时就需要简化。