stm32驱动手册f103

January 2008 Rev 1 1/121
UM0492
User manual
STM32F103xx
permanent-magnet synchronous motor FOC software library V1.0
Introduction
This user manual describes the permanent magnet synchronous motor (PMSM) FOC
software library, a field oriented control (FOC) firmware library for 3-phase permanent-
magnet motors developed for the STM32F103xx microcontrollers.
These 32-bit, ARM Cortex™-M3 cored ST microcontrollers (STM32F103xx) come with a set
of peripherals that makes it suitable for performing both permanent-magnet and AC
induction motor FOC. In particular, this manual describes the STM32F103xx software library
developed to control sine-wave driven permanent-magnet motors in both torque and speed
control mode. These motors may be equipped with an encoder, with three Hall sensors or
they may be sensorless. The control of an AC induction motor equipped with encoder or
tacho generator is described in the UM0483 user manual.
The PMSM FOC is made of several C modules, compatible with the free-of-charge IAR
EWARM KickStart edition toolchain version 4.42. It is used to quickly evaluate both the MCU
and the available tools. In addition, when used together with the STM32F103xx motor
control starter kit (STM3210B-MCKIT) and PM motor, a motor can be made to run in a very
short time. It also eliminates the need for time-consuming development of FOC and speed
regulation algorithms by providing ready-to-use functions that let the user concentrate on
the application layer. Moreover, it is possible to get rid of any speed sensor thanks to the
sensorless algorithm for rotor position reconstruction.
A prerequisite for using this library is basic knowledge of C programming, PM motor drives
and power inverter hardware. In-depth know-how of STM32F103xx functions is only
required for customizing existing modules and for adding new ones for a complete
application development.
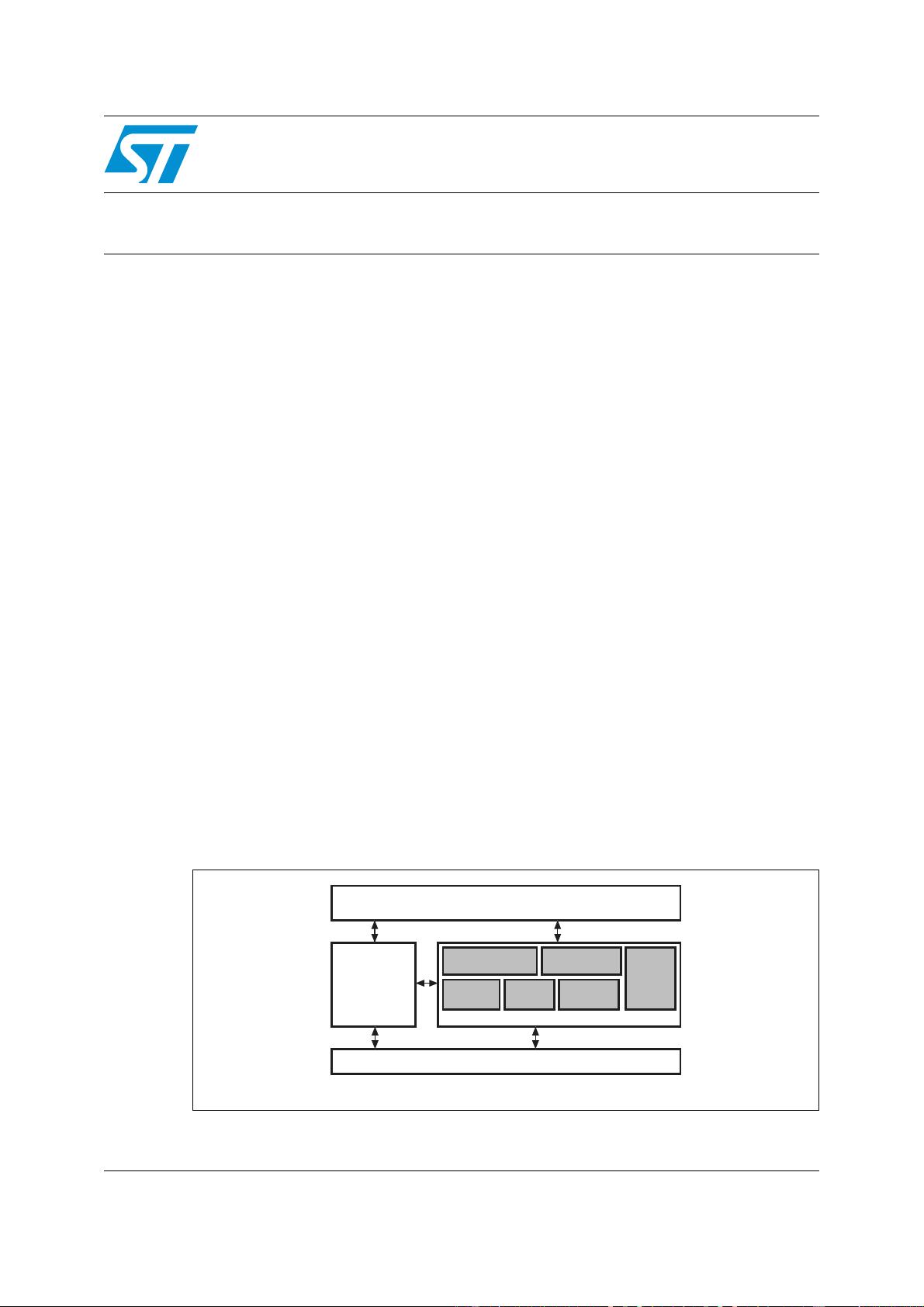
Figure 1 shows the architecture of the firmware. It uses the STM32F103xx standard library
extensively but it also acts directly on hardware peripherals when optimizations in terms of
execution speed or code size are required.
Figure 1. Firmware architecture
Application layer
STM32F103xx
standard
library
Speed, flux and
torque PIDs
Speed
feedback
Current
feedback
FOC drive
SVPWM
User
interface
STM32F103xx motor control library
STM32F103xx peripherals
ai14812
www.st.com




剩余120页未读,继续阅读
资源评论

 cuibv2014-02-18英文的确实有些麻烦,不过结合别的一起看还比较有帮助.
cuibv2014-02-18英文的确实有些麻烦,不过结合别的一起看还比较有帮助.











