机器人开发入门(Robot Building for Beginners, Third Edition)-2015年最新英文原版...
需积分: 9 121 浏览量
2016-12-06
14:43:10
上传
评论
收藏 20.15MB PDF 举报

David Cookwww.apress.com
US $ 34.99
Shelve in: Computer Hardware | General
User level: Beginning–Intermediate
TECHNOLOGY IN ACTION
™
SOURCE CODE ONLINE
Also available:
Cook
R
obot Building for Beginners, Third Edition provides basic,
practical knowledge on getting started in amateur robotics.
There is a mix of content: from serious reference tables and
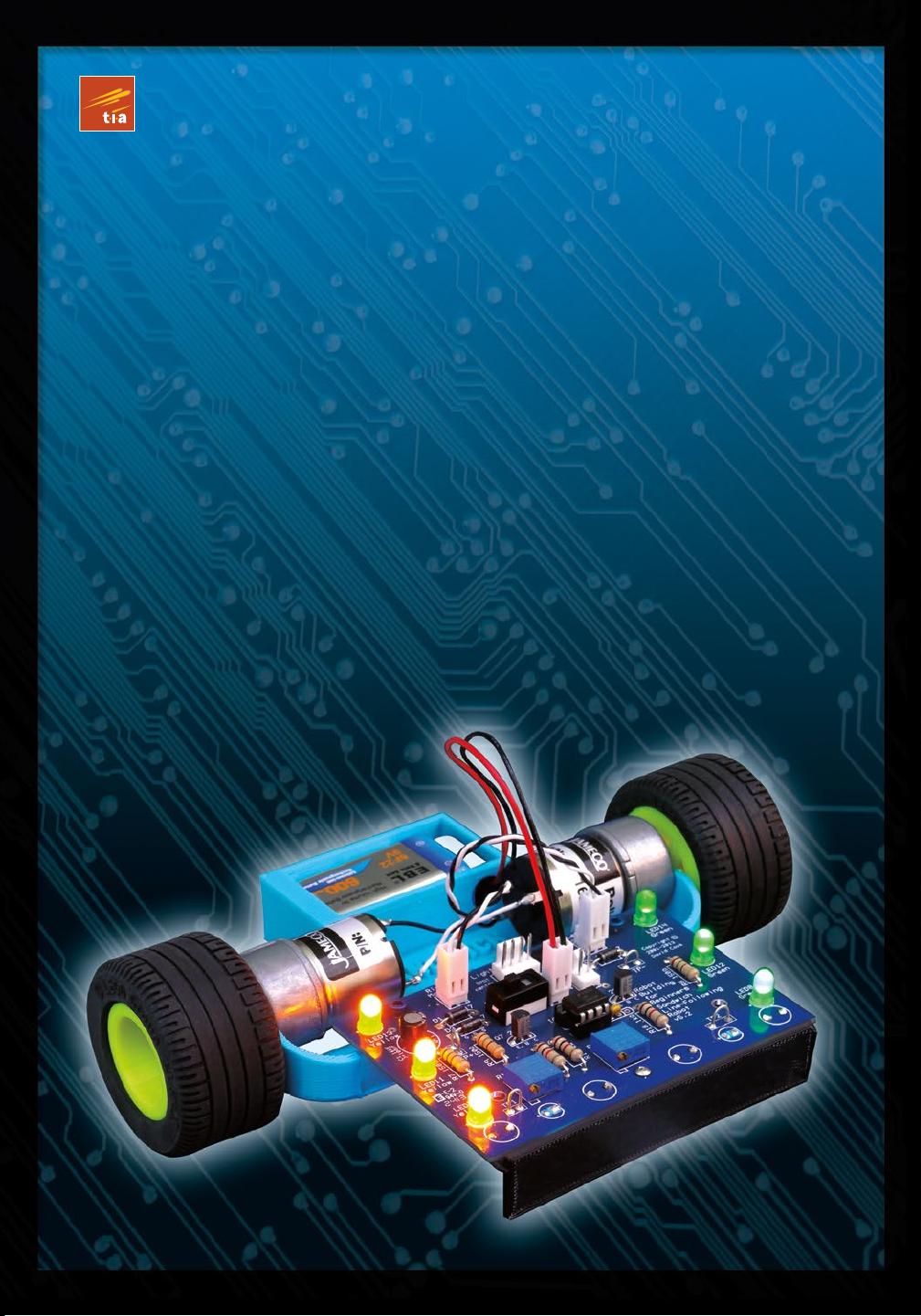
descriptions to personal stories and humorous bits. The robot
described and built in this book is battery powered and about
the size of a lunch box. It is autonomous; that is, it isn’t remote
controlled.
The book is broken up into small chapters and the master
project is a simple, entertaining, line-following robot. The char-
acteristics and purposes of each major component (resistor,
transistor, wire, and motor) are described, followed by a hands-on
experiment to demonstrate. Not only does this help the reader
to understand a particular piece, but it also prepares them with
processes to learn new parts on their own. An appendix offers
an introduction to 3D printing and parts of the robot can, as an
alternative, be “printed” using a 3D printer.
This book is for adults who have dreamed of building robots
since they were kids and older kids who dream of building robots
when they become adults. No background knowledge is neces-
sary. Anyone with desire and intelligence should be comfortable
with the tools, tricks, and parts to build.
Robot
Building
for Beginners
Robot Building for Beginners
Robot Building for Beginners
THIRD EDITION
THIRD
EDITION
9781484 213605
53499
ISBN 978-1-4842-1360-5



剩余471页未读,继续阅读
资源评论


求志达道
- 粉丝: 65
- 资源: 200









最新资源
- 自动驾驶-状态估计和定位之Error State EKF.pdf
- STM32F103ZET6+北斗
- 程序流程图的说明及图形示例
- FDN5618P-NL-VB一款SOT23封装P-Channel场效应MOS管
- Go语言基础(变量和基本类型).zip
- 基于CYCLONE2 (EP2C8Q) FPGA 设计PLL锁相环设置时钟Verilog源码Quartus工程文件.zip
- FDN372S-NL-VB一款SOT23封装N-Channel场效应MOS管
- date0425111111111111111111111
- 包含贪心算法的定义及python代码部分实现
- 自动驾驶-状态估计和定位之扩展卡尔曼滤波.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


