百度Apollo Dreamview打开方式及使用指南
需积分: 20 111 浏览量
2018-06-01
11:37:10
上传
评论 3
收藏 2.01MB PDF 举报


首先回顾下进入 Apollo 仿真界面 Dreamview 的步骤:
设置环境:
cd ~/apollo
docker ps //确认在没有 sudo 的情况下可以执行 docker 命令
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh
./apollo.sh
./apollo.sh clean
bash apollo.sh build //这一步将会编译所有的 apollo 文件(含有 nvidia 显卡的)
./apollo.sh build no perception dbg //未配备 nvidia 显卡时执行该命令(推荐使用)
bash scripts/bootstrap.sh //进入交互环境
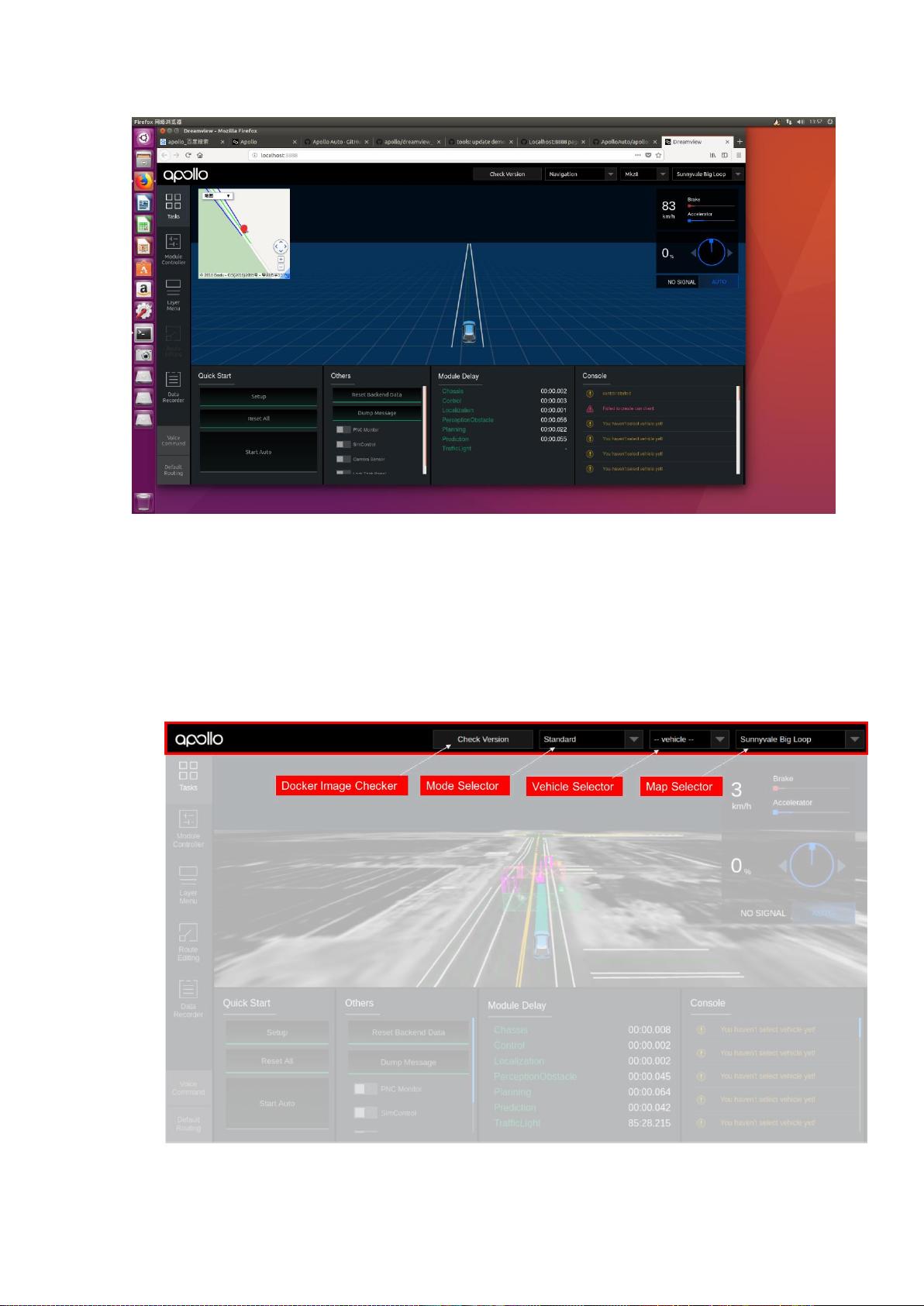
在浏览器输入 http://localhost:8888 后回车,出现以下界面开启 Dreamview,然后点击右上方的
Dreamview。退出 apollo 则:ctrl+d(ubuntu14.04)或者 ctrl+c(ubuntu16.04)。
演示样本(replay demo rosbag):
用以下命令可以测试系统是否正常工作:
# get rosbag note that the command download is required
python ./docs/demo_guide/rosbag_helper.py demo_2.5.bag
# You can now replay this demo "bag" in a loop with the '-l' flag
rosbag play -l demo_2.5.bag
剩余10页未读,继续阅读
资源评论













