


ICM-20602
High Performance 6-Axis MEMS MotionTracking™ Device
InvenSense reserves the right to change the detail
specifications as may be required to permit
improvements in the design of its products.
InvenSense Inc.
1745 Technology Drive, San Jose, CA 95110 U.S.A
+1(408) 988–7339
www.invensense.com
Document Number: DS-000176
Revision: 1.0
Revision Date: 10/03/2016
General Description
The ICM-20602 is a 6-axis MotionTracking device that
combines a 3-axis gyroscope, 3-axis accelerometer, in a small
3 mm x 3 mm x 0.75 mm (16-pin LGA) package.
High performance specs
o Gyroscope sensitivity error: ±1%
o Gyroscope noise: ±4 mdps/Hz
o Accelerometer noise: 100 µg/Hz
Includes 1 KB FIFO to reduce traffic on the serial bus
interface, and reduce power consumption by allowing the
system processor to burst read sensor data and then go
into a low-power mode
EIS FSYNC support
ICM-20602 includes on-chip 16-bit ADCs, programmable
digital filters, an embedded temperature sensor, and
programmable interrupts. The device features an operating
voltage range down to 1.71V. Communication ports include I
2
C
and high speed SPI at 10 MHz.
Ordering Information
PART
TEMP RANGE
PACKAGE
ICM-20602†
−40°C to +85°C
16-Pin LGA
†Denotes RoHS and Green-Compliant Package
Applications
Smartphones and Tablets
Wearable Sensors
IoT Applications
Motion-based game controllers
3D remote controls for Internet connected DTVs and
set top boxes, 3D mice
Features
3-Axis Gyroscope with Programmable FSR of ±250
dps, ±500 dps, ±1000 dps, and ±2000 dps
3-Axis Accelerometer with Programmable FSR of ±2g,
±4g, ±8g, and ±16g
User-programmable interrupts
Wake-on-motion interrupt for low power operation
of applications processor
1 KB FIFO buffer enables the applications processor to
read the data in bursts
On-Chip 16-bit ADCs and Programmable Filters
Host interface: 10 MHz SPI or 400 kHz Fast Mode I
2
C
Digital-output temperature sensor
VDD operating range of 1.71V to 3.45V
MEMS structure hermetically sealed and bonded at
wafer level
RoHS and Green compliant
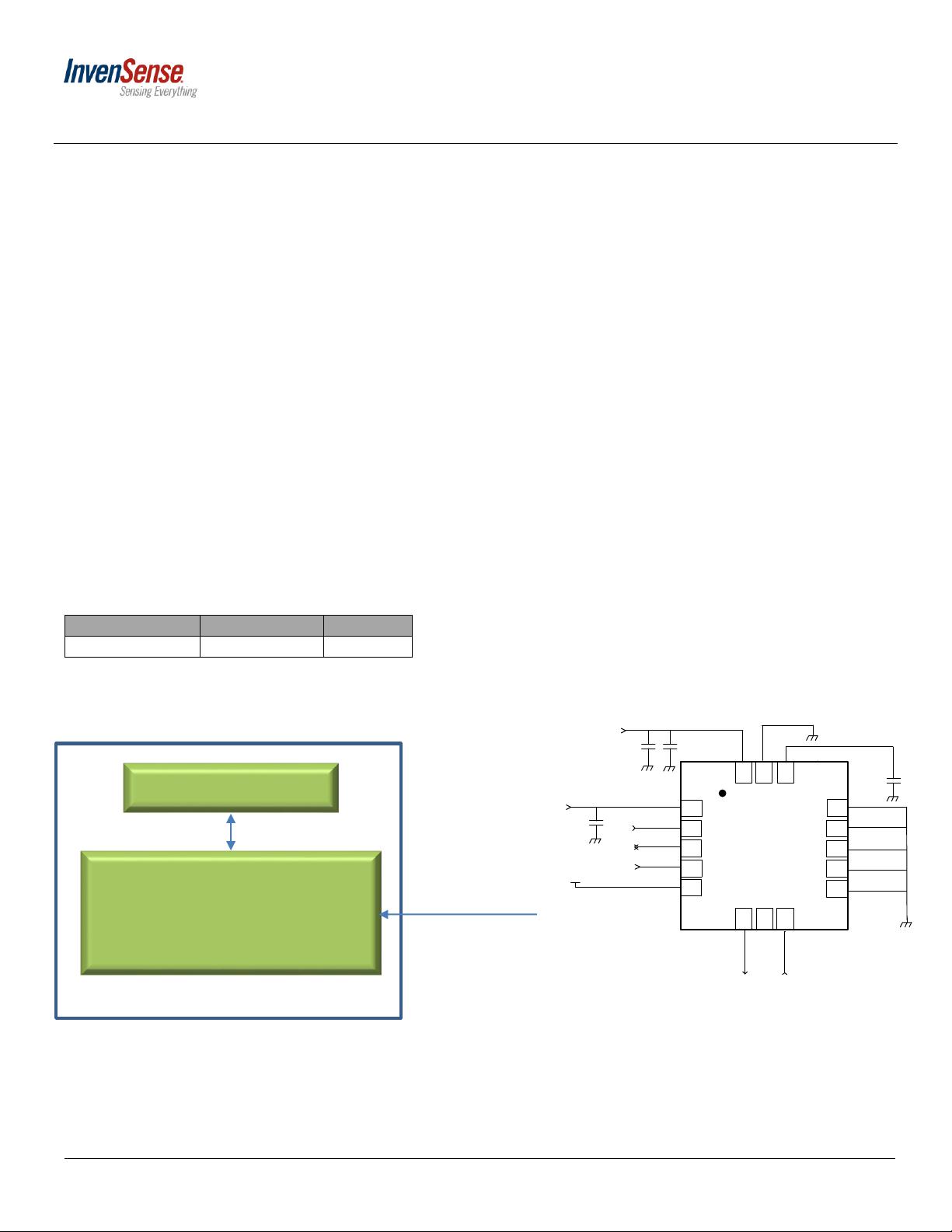
Typical Operating Circuit
6 7 8
9
1
4
16 15 14
ICM-20602
2
3
12
11
10
13
5
VDDIO
SA0/SDO
SCL/SPC
CS
SDA/SDI
C3, 10 nF
SCL
VDDIO
SDA
AD0
1.71 – 3.45 VDC
VDD
1.71 – 3.45VDC
C2, 0.1 mF
REGOUT
GND
RESV
RESV
C1, 0.1 mF
RESV
RESV
INT
FSYNC
RESV
RESV
C4, 2.2 mF
Block Diagram
AP/HUB
Main PCB
ICM-20602
SPI/I2C
S
M
FSYNC for EIS

ICM-20602
Document Number: DS-000176 Page 2 of 57
Revision: 1.0
Revision Date: 10/03/2016
TABLE OF CONTENTS
General Description ............................................................................................................................................. 1
Ordering Information ........................................................................................................................................... 1
Block Diagram ...................................................................................................................................................... 1
Applications ......................................................................................................................................................... 1
Features ............................................................................................................................................................... 1
Typical Operating Circuit ...................................................................................................................................... 1
1 Introduction ......................................................................................................................................................... 7
1.1 Purpose and Scope .................................................................................................................................... 7
1.2 Product Overview...................................................................................................................................... 7
1.3 Applications ............................................................................................................................................... 7
2 Features ............................................................................................................................................................... 8
2.1 Gyroscope Features .................................................................................................................................. 8
2.2 Accelerometer Features ............................................................................................................................ 8
2.3 Additional Features ................................................................................................................................... 8
3 Electrical Characteristics ...................................................................................................................................... 9
3.1 Gyroscope Specifications .......................................................................................................................... 9
3.2 Accelerometer Specifications .................................................................................................................. 10
3.3 Electrical Specifications ........................................................................................................................... 11
3.4 I
2
C Timing Characterization ..................................................................................................................... 14
3.5 SPI Timing Characterization .................................................................................................................... 15
3.6 Absolute Maximum Ratings .................................................................................................................... 16
4 Applications Information ................................................................................................................................... 17
4.1 Pin Out Diagram and Signal Description ................................................................................................. 17
4.2 Typical Operating Circuit ......................................................................................................................... 18
4.3 Bill of Materials for External Components .............................................................................................. 18
4.4 Block Diagram ......................................................................................................................................... 19
4.5 Overview ................................................................................................................................................. 19
4.6 Three-Axis MEMS Gyroscope with 16-bit ADCs and Signal Conditioning ............................................... 20
4.7 Three-Axis MEMS Accelerometer with 16-bit ADCs and Signal Conditioning ......................................... 20
4.8 I
2
C and SPI Serial Communication Interfaces .......................................................................................... 20
4.9 Self-Test................................................................................................................................................... 21
4.10 Clocking ............................................................................................................................................... 21
4.11 Sensor Data Registers ......................................................................................................................... 21
4.12 FIFO ..................................................................................................................................................... 22
4.13 Interrupts ............................................................................................................................................ 22
4.14 Digital-Output Temperature Sensor ................................................................................................... 22
4.15 Bias and LDOs ..................................................................................................................................... 22
4.16 Charge Pump ...................................................................................................................................... 22

ICM-20602
Document Number: DS-000176 Page 3 of 57
Revision: 1.0
Revision Date: 10/03/2016
4.17 Standard Power Modes – Update the Power Modes ......................................................................... 22
5 Programmable Interrupts .................................................................................................................................. 23
5.1 Wake-on-Motion Interrupt ..................................................................................................................... 23
6 Digital Interface ................................................................................................................................................. 24
6.1 I
2
C and SPI Serial Interfaces .................................................................................................................... 24
6.2 I
2
C Interface ............................................................................................................................................. 24
6.3 I
2
C Communications Protocol ................................................................................................................. 24
6.4 I
2
C Terms ................................................................................................................................................. 26
6.5 SPI Interface ............................................................................................................................................ 26
7 Serial Interface Considerations .......................................................................................................................... 28
7.1 ICM-20602 Supported Interfaces ............................................................................................................ 28
8 Register Map ...................................................................................................................................................... 29
9 Register Descriptions ......................................................................................................................................... 32
9.1 Register Descriptions .............................................................................................................................. 32
9.2 Register 04 – Gyroscope Low Noise to Low Power Offset Shift and Gyroscope Offset Temperature Compensation (TC) Register32
9.3 Register 05 – Gyroscope Low Noise to Low Power Offset Shift and Gyroscope Offset Temperature Compensation (TC) Register32
9.4 Register 07 – Gyroscope Low Noise to Low Power Offset Shift and Gyroscope Offset Temperature Compensation (TC) Register32
9.5 Register 08 – Gyroscope Low Noise to Low Power Offset Shift and Gyroscope Offset Temperature Compensation (TC) Register33
9.6 Register 10 – Gyroscope Low Noise to Low Power Offset Shift and Gyroscope Offset Temperature Compensation (TC) Register33
9.7 Register 11 – Gyroscope Low Noise to Low Power Offset Shift and Gyroscope Offset Temperature Compensation (TC) Register33
9.8 Registers 13 to 15 Accelerometer Self-Test Registers ............................................................................ 34
9.9 Register 19 – X-Gyro Offset Adjustment Register: High Byte ................................................................. 34
9.10 Register 20 – X-Gyro Offset Adjustment Register: Low Byte .............................................................. 34
9.11 Register 21 – Y-Gyro Offset Adjustment Register: High Byte ............................................................. 35
9.12 Register 22 – Y-Gyro Offset Adjustment Register: Low Byte .............................................................. 35
9.13 Register 23 – Z-Gyro Offset Adjustment Register: High Byte ............................................................. 35
9.14 Register 24 – Z-Gyro Offset Adjustment Register: Low Byte .............................................................. 35
9.15 Register 25 – Sample Rate Divider ...................................................................................................... 36
9.16 Register 26 – Configuration ................................................................................................................ 36
9.17 Register 27 – Gyroscope Configuration .............................................................................................. 37
9.18 Register 28 – Accelerometer Configuration ....................................................................................... 37
9.19 Register 29 – Accelerometer Configuration 2..................................................................................... 38
9.20 Register 30 – Gyroscope Low Power Mode Configuration ................................................................. 39
9.21 Register 32 – Wake-on Motion Threshold: X-Axis Accelerometer ..................................................... 40
9.22 Register 33 – Wake-on Motion Threshold: Y-Axis Accelerometer...................................................... 40
9.23 Register 34 – Wake-on Motion Threshold: Z-Axis Accelerometer ...................................................... 40
9.24 Register 35 – FIFO Enable ................................................................................................................... 41
9.25 Register 54 – FSYNC Interrupt Status.................................................................................................. 41
9.26 Register 55 – INT/DRDY Pin / Bypass Enable Configuration ............................................................... 41

ICM-20602
Document Number: DS-000176 Page 4 of 57
Revision: 1.0
Revision Date: 10/03/2016
9.27 Register 57 – FIFO Watermark Interrupt Status ................................................................................. 42
9.28 Register 58 – Interrupt Status ............................................................................................................. 42
9.29 Registers 59 to 64 – Accelerometer Measurements: X-Axis High Byte .............................................. 42
9.30 Registers 65 to 66 – Temperature Measurement............................................................................... 43
9.31 Registers 67 to 72 – Gyroscope Measurement................................................................................... 43
9.32 Register 80 to 82 – Gyroscope Self-Test Registers ............................................................................. 44
9.33 Register 96 to 97 – FIFO Watermark Threshold in Number of Bytes ................................................. 45
9.34 Register 104 – Signal Path Reset ......................................................................................................... 45
9.35 Register 105 – Accelerometer Intelligence Control ............................................................................ 45
9.36 Register 106 – User Control ................................................................................................................ 46
9.37 Register 107 – Power Management 1 ................................................................................................ 46
9.38 Register 108 – Power Management 2 ................................................................................................ 47
9.39 Register 112 – I
2
C Interface ................................................................................................................ 47
9.40 Register 114 and 115 – FIFO Count Registers ..................................................................................... 47
9.41 Register 116 – FIFO Read Write .......................................................................................................... 48
9.42 Register 117 – Who Am I .................................................................................................................... 48
9.43 Registers 119, 120, 122, 123, 125, 126 – Accelerometer Offset Registers ......................................... 49
10 Use Notes ........................................................................................................................................................... 50
10.1 Temperature Sensor Data ................................................................................................................... 50
10.2 Accelerometer-Only Low-Noise Mode ............................................................................................... 50
10.3 Accelerometer Low-Power Mode ....................................................................................................... 50
10.4 Sensor Mode Change .......................................................................................................................... 50
10.5 Temp Sensor during Gyroscope Standby Mode ................................................................................. 50
10.6 Gyroscope Mode Change.................................................................................................................... 50
10.7 Power Management 1 Register Setting .............................................................................................. 50
10.8 Unlisted Register Locations ................................................................................................................ 50
10.9 Clock Transition When Gyroscope is Turned Off ................................................................................ 50
10.10 Sleep Mode ......................................................................................................................................... 50
10.11 No special operation needed for FIFO read in low power mode........................................................ 50
10.12 Gyroscope Standby Procedure ........................................................................................................... 51
11 Assembly ............................................................................................................................................................ 52
11.1 Orientation of Axes ............................................................................................................................. 52
12.1 Package Dimensions ........................................................................................................................... 53
13 Part Number Package Marking .......................................................................................................................... 55
14 Revision History ................................................................................................................................................. 56
15 Environmental Compliance ................................................................................................................................ 57

ICM-20602
Document Number: DS-000176 Page 5 of 57
Revision: 1.0
Revision Date: 10/03/2016
LIST OF FIGURES
Figure 1. I
2
C Bus Timing Diagram ............................................................................................................................................................. 14
Figure 2. SPI Bus Timing Diagram ............................................................................................................................................................. 15
Figure 3. Pin out Diagram for ICM-20602 3 mm x 3 mm x 0.75 mm LGA ................................................................................................ 17
Figure 4. ICM-20602 Application Schematic ............................................................................................................................................ 18
Figure 5. ICM-20602 Block Diagram ......................................................................................................................................................... 19
Figure 6. ICM-20602 Solution Using I
2
C Interface .................................................................................................................................... 20
Figure 7. ICM-20602 Solution Using SPI Interface ................................................................................................................................... 21
Figure 8. START and STOP Conditions ...................................................................................................................................................... 24
Figure 9. Acknowledge on the I
2
C Bus ..................................................................................................................................................... 25
Figure 10. Complete I
2
C Data Transfer ..................................................................................................................................................... 25
Figure 11. Typical SPI Master/Slave Configuration .................................................................................................................................. 27
Figure 11. I/O Levels and Connections ..................................................................................................................................................... 28
Figure 13. Orientation of Axes of Sensitivity and Polarity of Rotation .................................................................................................... 52
Figure 14. Package Dimensions................................................................................................................................................................ 53
Figure 15. Part Number Package Marking ............................................................................................................................................... 55















