:“matlab-SINS和GPS组合导航”是一个基于MATLAB实现的综合项目,它涉及到传感器集成导航系统(SINS)与全球定位系统(GPS)的融合算法。这个项目的核心在于利用这两种导航技术的优势,提高定位精度和稳定性。
:“matlab_SINS和GPS组合导航”提供了一系列的MATLAB程序,这些程序设计用于处理SINS和GPS的数据,进行融合计算,并生成分析结果。项目中包含了所有必要的数据文件,以及运行后生成的分析图表,使得用户能够直观地理解系统的工作原理和性能。
【知识点详解】:
1. **SINS( Strapdown Inertial Navigation System)**:这是一种惯性导航系统,通过测量载体在三个轴向上的加速度和角速率来确定位置、速度和姿态。系统包括三轴陀螺仪和三轴加速度计,连续监测载体运动状态,但随着时间的推移,由于累积误差,精度会逐渐降低。
2. **GPS(Global Positioning System)**:全球定位系统是一种基于卫星导航的定位系统,通过接收多个卫星发射的信号,计算出接收器的位置、速度和时间信息。GPS具有高精度和实时性的优点,但可能受到遮挡或干扰影响。
3. **组合导航**:结合SINS和GPS的优点,通过数据融合算法(如卡尔曼滤波)消除单一系统的局限性,实现更高精度和更稳定的导航。这种方法可以减少SINS的漂移误差,同时增强GPS在遮蔽环境下的定位能力。
4. **MATLAB**:一种强大的数学计算和编程环境,广泛用于科学计算、数据分析和算法开发。在这个项目中,MATLAB被用来编写SINS和GPS数据处理及融合的算法。
5. **数据处理**:项目包含的数据文件可能包括SINS的原始加速度和角速率数据,以及GPS接收器的伪距和信号强度信息。这些数据会被输入到MATLAB程序中,进行预处理、滤波和融合运算。
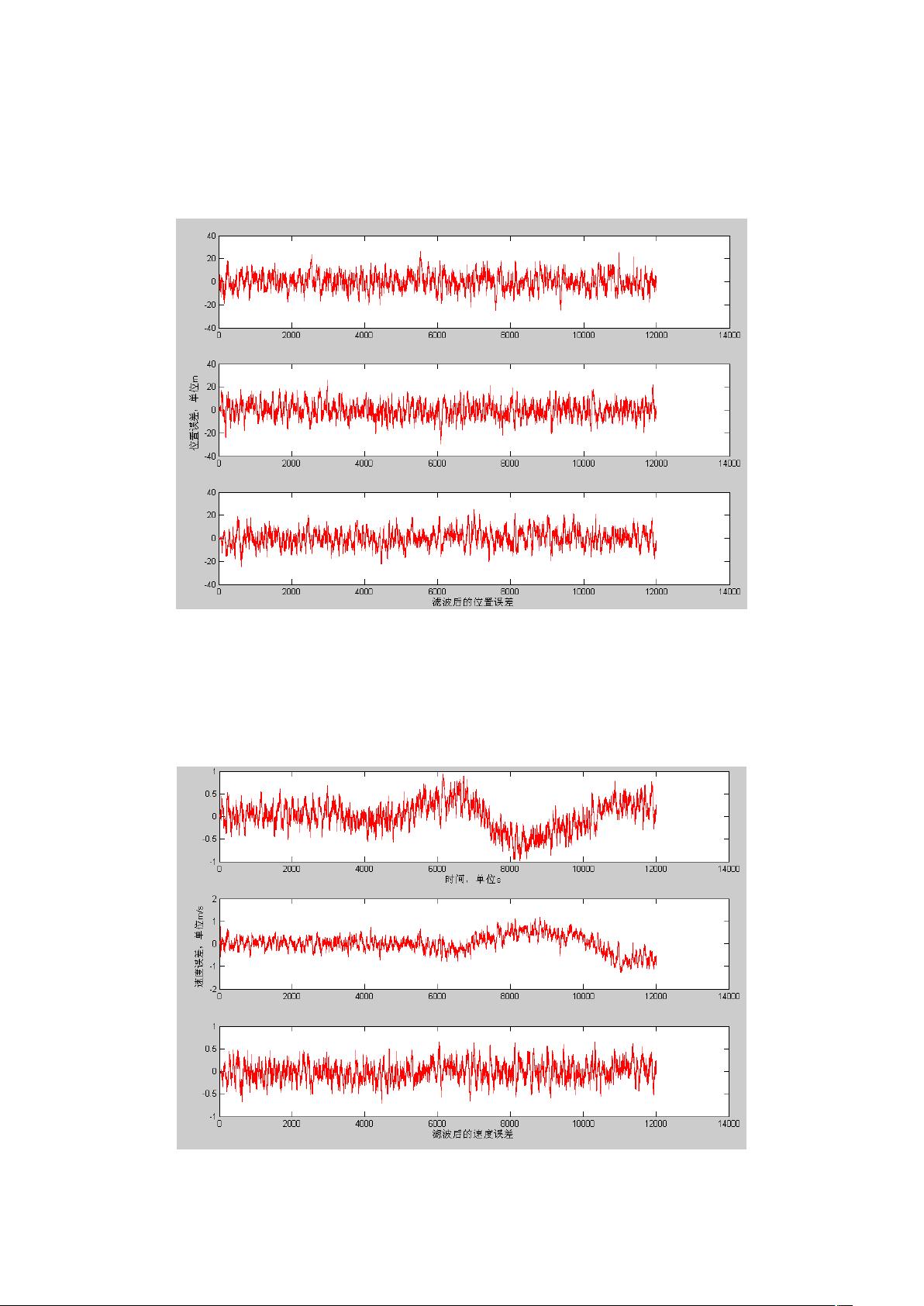
6. **分析图表**:运行后的分析图可能包括位置轨迹对比、误差统计、滤波效果展示等,帮助用户评估SINS-GPS组合导航系统的性能,如定位精度、收敛速度和稳定性。
7. **卡尔曼滤波**:在组合导航中,卡尔曼滤波是最常用的融合算法之一。它利用预测和更新步骤,结合来自不同源的信息,估计最有可能的系统状态,从而实现误差校正和优化定位结果。
通过这个项目,学习者可以深入理解SINS和GPS的联合工作原理,掌握数据融合技术,并提升MATLAB编程技能。此外,这个项目还提供了实际操作经验,对于理解导航系统设计和优化具有很高的价值。

 SINS和GPS组合导航.zip (7个子文件)
SINS和GPS组合导航.zip (7个子文件)  SINS和GPS组合导航
SINS和GPS组合导航  GPS_INS位置组合结果.doc 77KB
GPS_INS位置组合结果.doc 77KB 程序说明.txt 410B
程序说明.txt 410B s_GPS_INS_position_sp_demo.asv 4KB
s_GPS_INS_position_sp_demo.asv 4KB

















