基于多特征自适应的单光子点云去噪算法.docx
版权申诉
123 浏览量
2023-02-23
16:46:19
上传
评论 1
收藏 802KB DOCX 举报


0. 引 言
激光雷达(Light Detection and Ranging,LiDAR)是集激光、全球定位系统和惯性导
航系统于一体的高效对地观测系统,能够获取地面及地面目标的高精度三维信息
[1]
。在
2018 年,美国 NASA 发射的 ICESat-2 搭载了先进的地形测绘系统(Advanced Topographic
Laser Altimeter System, ATLAS),它采用多波束微脉冲光子技术,3 对强弱波束以 10 kHz
的高重频、沿轨向 0.7 m 间隔获取全球范围内的高精度三维信息
[2]
。ATLAS 具有高重频、
微脉冲、小光斑、高效率、轻量化等优势,但是易受太阳背景噪声的影响,数据中混杂了
大量的噪声,使得有效信号的提取变得困难
[3]
。ATLAS 数据沿轨道成条状分布,光子点云
密度不均匀,因此需要研究合适的光子点云去噪算法
[4]
。
国内外学者针对单光子点云去噪算法开展了很多研究,Magruder 等于 2012 年首先介
绍了 3 种光子点云去噪方法,包括 Canny 边缘检测、基于概率密度函数和局部统计分析的
信号提取
[5]
,可分为基于图像处理和局部统计的两类点云去噪算法。现有基于图像处理的
去噪算法中主要以直方图为主,在 ATLAS 官方发布的系列产品中,ATL03 产品采用的是
基于直方图的滤波算法,但是在复杂地形区域性能较差
[6]
。David 等针对存在坡度的地区
实行倾斜直方图算法,但是其倾斜直方图的斜率是通过已获得信号线性拟合得到
[7]
。基于
局部统计的去噪算法种类较多,且发展出多种自适应点云去噪算法。ATL08 产品采用的算
法为差分、回归和高斯自适应最近邻算法(Differential,Regressive,and Gaussian Adaptive
Nearest Neighbor, DRAGANN),在噪声水平相同的情况下具有较强的自适应,但是对于
局部噪声水平变化不敏感
[8]
。许艺腾等提出了基于地形相关和最小二乘曲线拟合的单光子
激光数据处理技术,同样是将噪声考虑为均匀分布
[9]
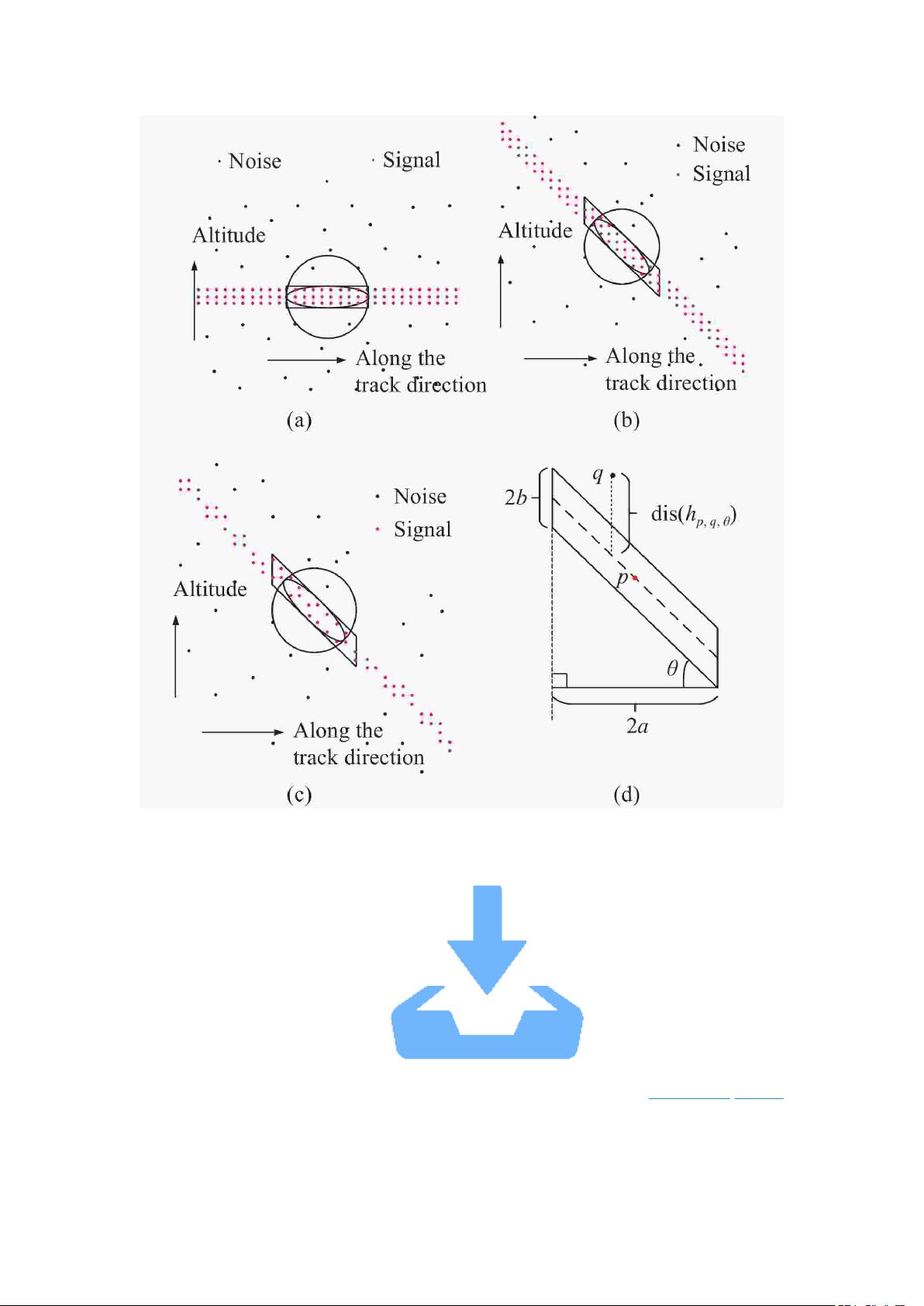
。曹彬才等提出基于空间密度自适应
的单光子激光点云去噪算法,通过将局部密度拟合为两个高斯函数对噪声和信号进行自适
应阈值分割,但是其局部密度由圆形半径的确定
[10]
。Zhang 等提出改进的 DBSCAN 算法
(Density Based Spatial Clustering of Applications with Noise),考虑到地面点云在水平方向
更为集中,将传统的圆形改进为水平椭圆,但是这也会导致在坡度大的区域效果较差
[11]
。
谢锋等提出方向自适应的光子计数激光雷达滤波方法,采用密度最大的方向作为最佳的滤
波方向,这可能会使地面附近的噪声被识别为信号
[12]
。光子去噪算法逐渐成熟,但在结果
中不可避免地会出现一些靠近地面的噪声点被误分为信号光子和信号密度较低识别不出来
的问题
[13]
。
综上所述,目前单光子点云的噪声滤除主要难点是在坡度较大和噪声水平不一致的区
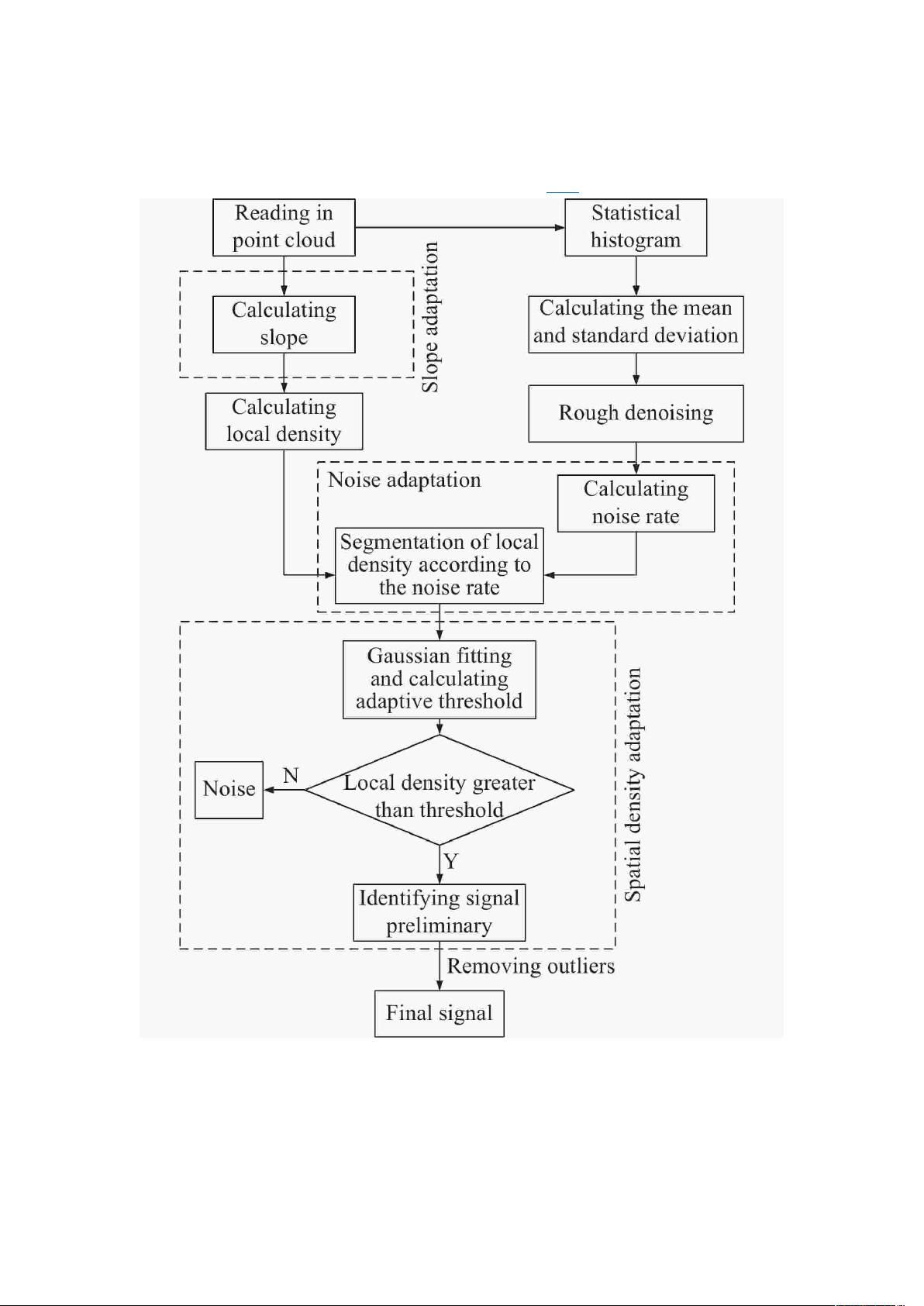
域难以取得很好的结果,为此文中提出了一种基于多特征自适应的单光子点云去噪算法。
1. 数据处理算法

剩余25页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3530
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











