

建筑物是城市的主体之一,建筑物的变化信息可以有效帮助判断地区城镇化水平,辅
助城市规划管理,及时查处违规建筑
[1]
。随着数字城市、智慧城市的兴起,地理数据库的
准实时、增量更新逐渐成为当前研究的热点
[2]
,快速、精确的建筑物三维变化检测已经引
起广泛的关注。
建筑物变化检测主要分为二维变化检测和三维变化检测
[3]
。二维变化检测主要以高分
辨率图像作为数据来源,通常分为像素级和对象级两类
[4]
。像素级变化检测首先逐像素计
算光谱、纹理及其他转换特征并判断变化状态,然后基于变化像素进行面向对象的分类,
从而得到建筑物变化目标
[5-7]
;对象级变化检测多基于现有矢量数据及先验知识或通过多尺
度分割获取建筑物目标,然后进行面向建筑物对象的变化检测
[8-11]
。现有二维变化检测方法
多应用于卫星影像,但由于低空无人机影像存在视点变化及建筑物变形等现象,现有方法
难以适用
[12]
。
三维变化检测主要以激光雷达(light detection and ranging,LiDAR)点云和影像密
集匹配点云作为数据来源,针对建筑物层高变化进行检测。按照变化检测单元区分,三维
变化检测可以分为逐点与基于对象变化检测两类
[3]
。逐点变化检测方法多采用多时相
LiDAR 点云数据逐点计算高差或使用图割等方法逐点获取变化区域,通过结构特征识别确
定建筑物目标变化状态
[13-16]
。该类方法对点云质量敏感,易受树木季节性变化等因素的影
响,且变化检测能量函数构造及阈值选取困难,难以应用于噪声大、密度不均的影像密集
匹配点云。
基于对象变化检测方法通常先对点云进行分割或分类,继而分析各分割分类对象块内
变化。文献[17]按照影像点云中纹理及几何特征的不同组合方式,生成具有互补性的多基
元分割面片,基于分割面片实现变化建筑物的提取。文献[18-19]先对地物进行分类,再基
于分类结果进行变化建筑物目标的检测。此类方法将分割分类与变化检测过程割裂,使得
最终变化检测结果受到前序分割分类误差的影响,形成误差累计,检测精度依赖于分割分
类质量。无人机影像密集匹配点云受其质量制约,难以得到较高的分类/分割精度。因此,
先分割/分类、后变化检测的思路不适用于无人机密集匹配点云数据。目前,基于无人机影
像密集匹配点云进行建筑物变化检测的研究较少。文献[12]基于无人机影像密集匹配获取
点云,先通过逐点比较生成深度及灰度差值图,并融合二者获取变化区域,然后通过随机
森林识别变化建筑物目标。该方法难以确定融合权重,且具有样本依赖性。总体而言,受
点云质量、数据遮挡及缺乏变化样本库等限制,现有变化检测算法难以直接推广到无人机
密集点云变化检测中。
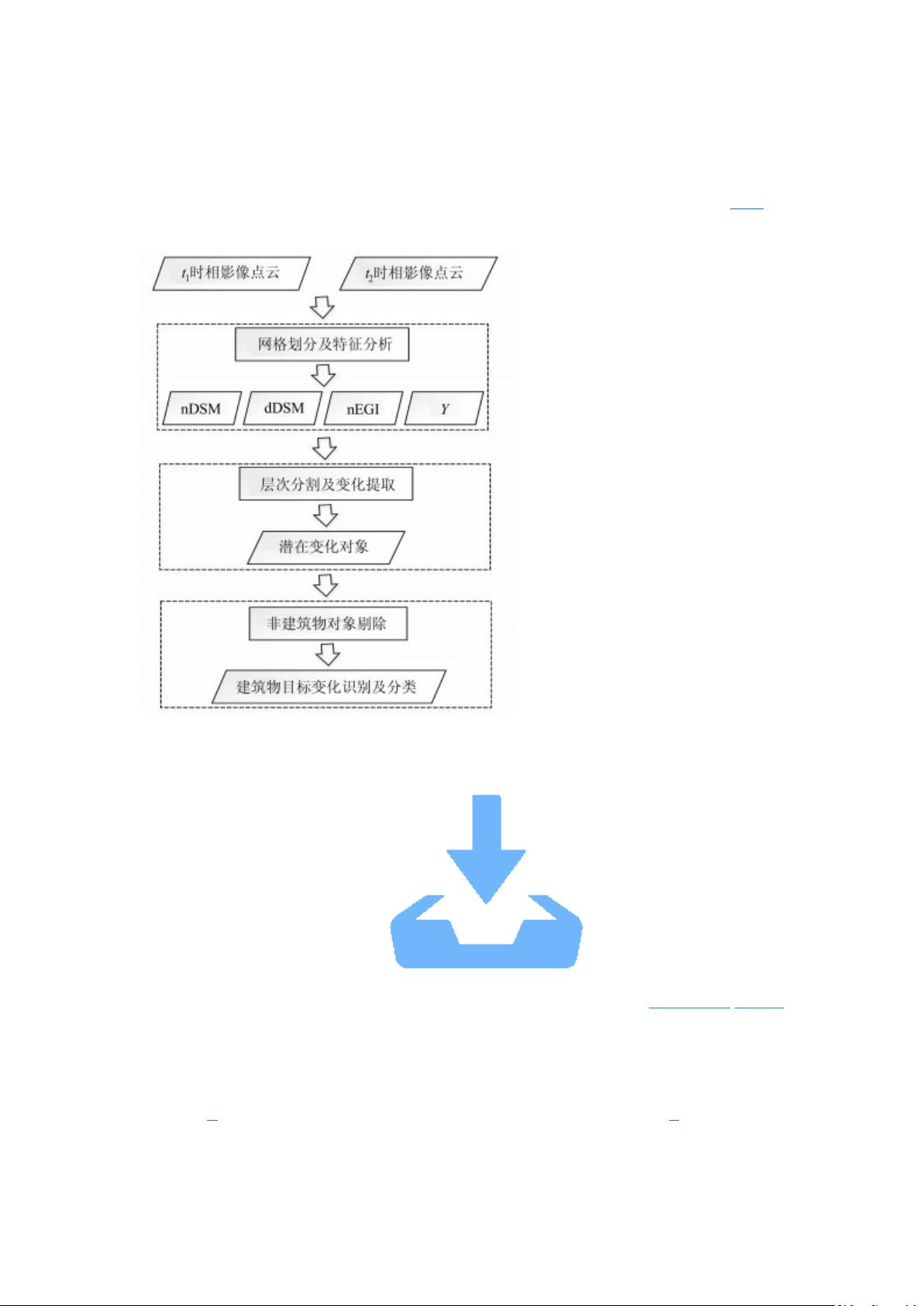
针对以上问题,本文提出一种基于多层次分割的建筑物层高变化检测方法,通过色度
异质性阈值按层级递减,实现由粗到细的多尺度区域生长,在分割块内采用投票的统计学
方法,确定分割块变化状态,从而将分割与变化检测过程相融合,实现高效、高精度的建
筑物层高变化检测。

剩余13页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4459
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


