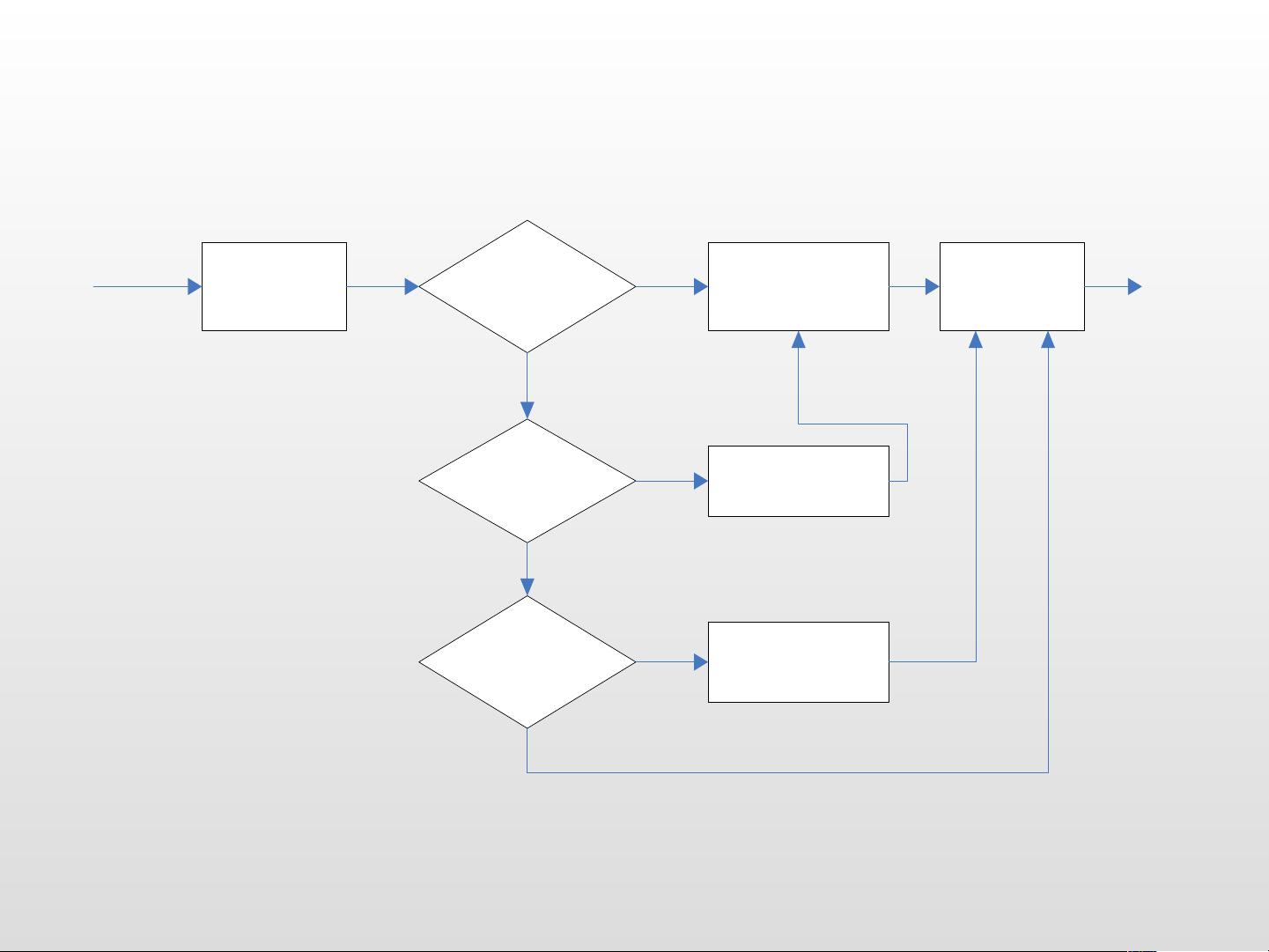
数据关联是建立单一的传感器测量与以前其它测量之间关
系,以确定它们是否来自同一目标源的处理过程。
与已有目标集合有同一源;
新目标集合;表示该目标为真实的,且以前没有该目标测量。
虚警集合;表示该测量是不真实的,可能由噪声、干扰或杂波
剩余产生。
由于测量可能在不同的坐标系下进行,不同的传感器在不
同的时间观测不同的源(目标),不但在时间上不同步,而且
在空间上有不同的分辨力,因此,关联处理必须建立每个测量
与大量的可能数据集合的关系,每个数据集合表示一个说明该
观测源的假设,它们是下列几种可能之一:
一、引言