Performance Comparison of PSO Algorithms for
Mobile Robot Path Planning in Complex
Environments
Dr. Ravi Kumar Jatoth
1
, K. Jaya Shankar Reddy
2
,
K. Karthikeya Yadav
3
1
Dept. of Electronics and Communication Engineering, National Institute of Technology, Warangal.
2, 3
Dept. of Computer Science and Engineering, National Institute of Technology, Andhra Pradesh.
Abstract— This paper compares the different Particle
Swarm Optimization (PSO) Algorithms applied for Mobile
Robot Path Planning in Complex Environments. The
paper focuses on the paths that are feasible for a Mobile
Robot by avoiding static obstacles in a given complex
Environment. In this, a constrained environment is chosen
where robot is represented as a single point. Particle
Swarm Optimization is one of the best evolutionary
algorithms applied for Robot Path Planning. There are
many improved versions of Particle Swarm Optimization
modifying the Classical PSO. In this paper, four different
versions of PSO were applied for mobile Robot Path
Planning and the results were compared.
Index Terms—Mobile Robot, Path Planning, Classical PSO,
Binary PSO, Adaptive PSO, Modified PSO, Complex
Environments.
I. INTRODUCTION
Path planning is a fundamental problem in mobile robotics.
Path planning is the process of generating a feasible path for a
Mobile Robot in such a way that the robot avoids obstacles.
The Robot Path Planning is classified as local and global [1 –
3]. In local Path Planning the robot reaches the goal in steps
evolving its next best position each time in an unknown or
known environment where as in global path planning the
Robot first reaches the goal and tries different paths to avoid
obstacles. Global path Planning is also referred as offline path
planning and local path planning as real time path planning.
Every path which directs the Robot from source to desired
target is a feasible path [4]. Generally Path planning involves
two main aims: 1) the path should be feasible 2) The path
should also avoid obstacles. Achieving the above two aims
enables the Robot path planning. In practical cases Robot Path
planning is done by detecting the obstacles using image
processing both either in known and unknown environments
or even in static and dynamic environments. But in
optimization techniques we do not use image processing for
detecting obstacles. So it becomes a bit difficult to generate a
path in an unknown environment using optimization [5]. In
this paper we use a known environment in which there are
geometrical obstacles.
For Robot Path planning we can use suitable evolutionary
algorithms out of which Particle Swarm Optimization is in our
Interest. Basic Types of Particle Swarm Optimization
algorithms (PSO) are Adaptive PSO, Binary PSO and the
Modified PSO. All these are discussed below.
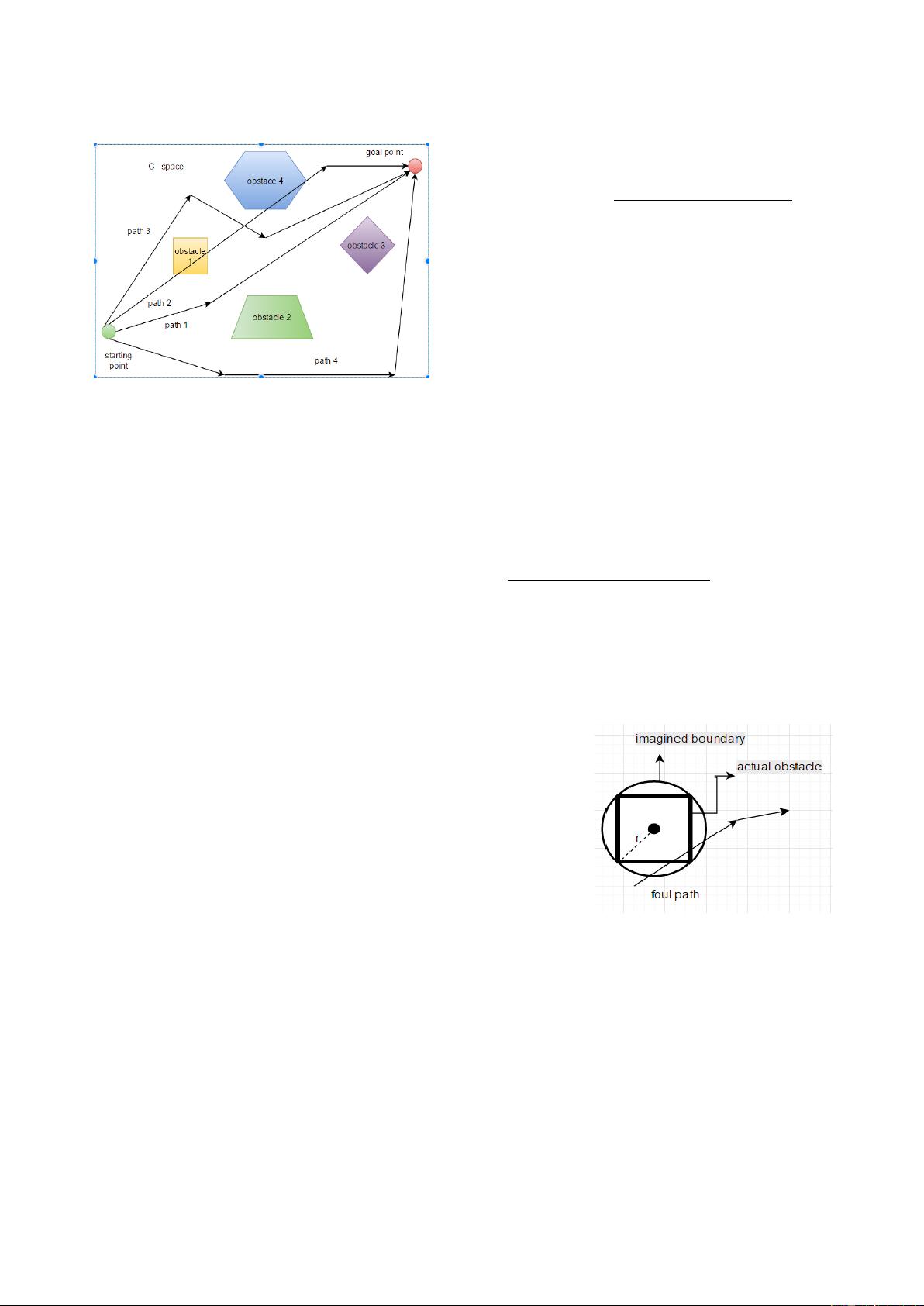
II. PROBLEM FORMULATION
The problem is states as follows. The Robot is considered as a
single point and moves in a closed worked space. The
workspace is a 2 Dimensional (2 D) environment containing
static and geometrical obstacles. The source point and the
desired goal point are chosen. The objective is to generate a
collision free path taking the robot from the source point and
the goal point. The path is divided into segments connecting
points from the source to the goal. The area in the workspace
occupied by the segments of the path is the configuration
space (C – Space). Practically C space is the region obtained
by sliding the robot along the edges of the obstacles. The
complexity of the path planning increases as the number of
dimensions of the C – space increases.
The path is made not to go out of the C – space by applying
the limits of position and the velocities. The path will be
smooth only if the obstacles do not have sharp corners. But in
complex cases there might be sharp cornered obstacles. So we
can imagine them blunt by circumscribing or inscribing a
circle of fewer radiuses around the obstacles. The path will
avoid the circles which imply that the original obstacles are
avoided.
Looking for the shorter path does not mean that the time
taken is less; we need complex algorithm for a complex
environment where the time taken to generate the shortest path
might be longer.