永磁同步电机(PMSM)的FOC闭环控制详解.docx
需积分: 35 41 浏览量
2019-12-18
15:14:55
上传
评论 6
收藏 504KB DOCX 举报

在学习 FOC 控制前,我对于 FOC 控制完全不懂,只知道中文叫做磁场定向控制,因公司产品开发需要用
到对永磁同步电机(PMSM)进行精确的位置控制,才开始从网上了解什么是 FOC,有哪些数学公式,控制
的过程是怎么样的,但由于公司没有人知道这一块的知识,所以只能一个人慢慢找资料学习,网上有不少
关于 FOC 的资料,不过讲的都不全面,而且有的还会存在错误,但是不懂的时候也无法分辨对错,所以
走了不少弯路。所以将个人的学习心得记录于此,与大家分享,由于需要对电机进行位置控制,所以使用
了 14 位分辨率的磁编码器。
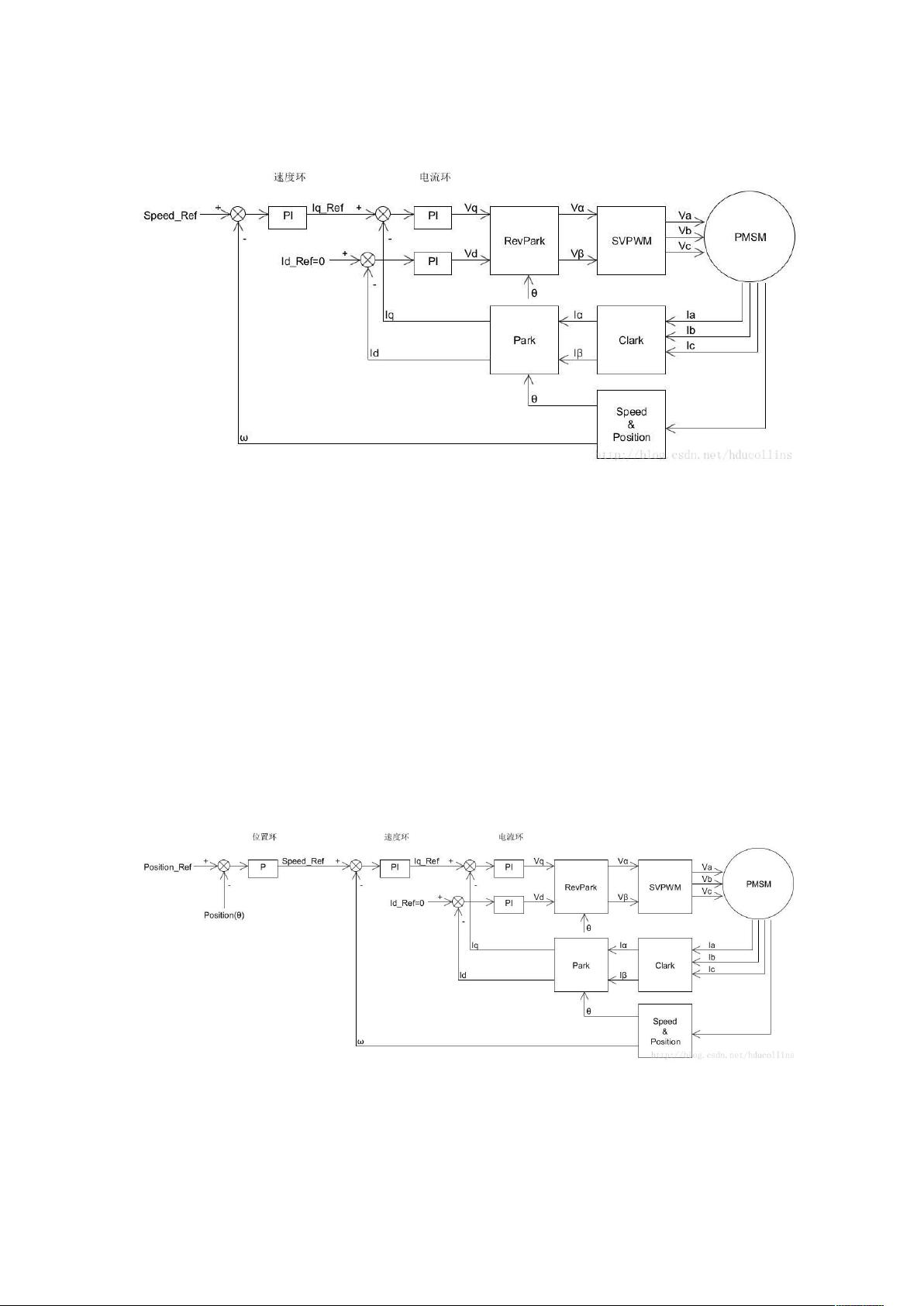
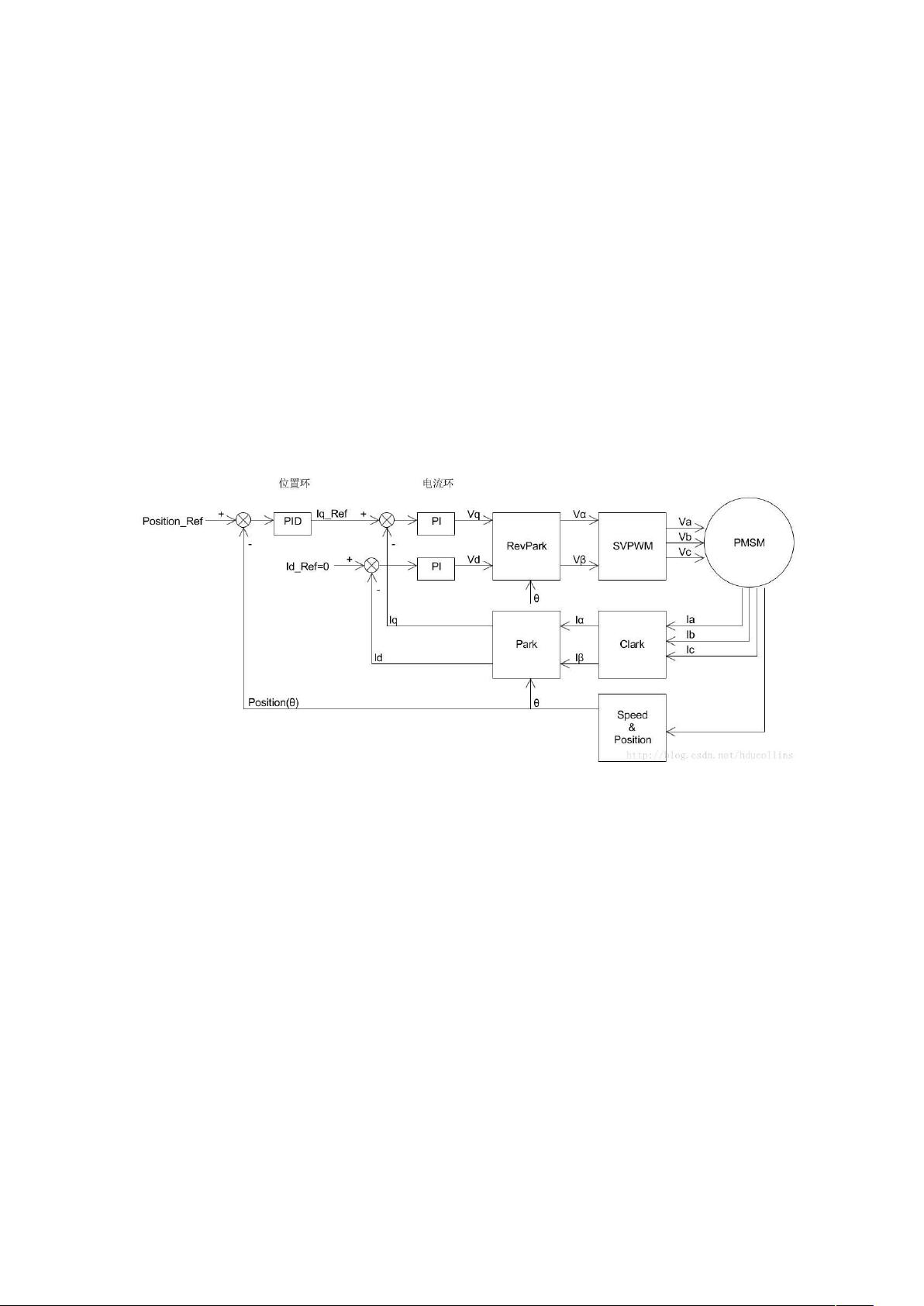
FOC 主要是通过对电机电流的控制实现对电机转矩(电流)、速度、位置的控制。通常是电流作为最内
环,速度是中间环,位置作为最外环。
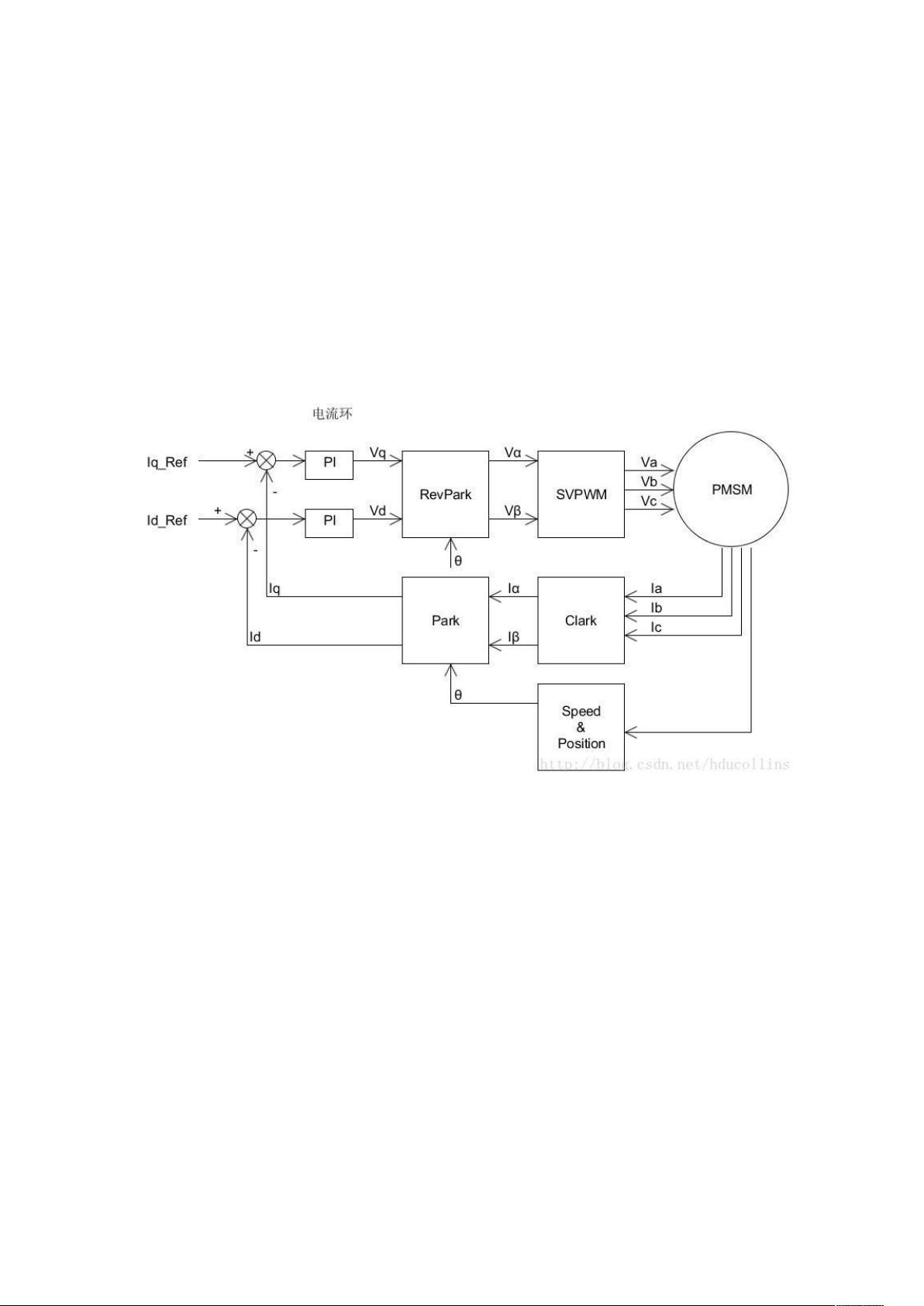
下图是电流环(最内环)的控制框图:
图一:电流环
在图一中,Iq_Ref 是 q 轴(交轴)电流设定值,Id_Ref 是 d 轴(直轴)电流设定值,关于交轴直轴不再介绍,
大家自行百度。
Ia, Ib, Ic 分别是 A 相、B 相、C 相的采样电流,是可以直接通过 AD 采样得到的,通常直接采样其中两
相,利用公式 Ia+Ib+Ic=0 计算得到第三相,电角度 θ 可以通过实时读取磁编码器的值计算得到。
在得到三相电流和电角度后,即可以进行电流环的执行了:三相电流 Ia, Ib, Ic 经过 Clark 变换得到 Iα,
Iβ;然后经过 Park 变换得到 Iq, Id;然后分别与他们的设定值 Iq_Ref, Id_Ref 计算误差值;然后分别将 q
轴电流误差值代入 q 轴电流 PI 环计算得到 Vq,将 d 轴电流误差值代入 d 轴电流 PI 环计算得到 Vd;然后
对 Vq, Vd 进行反 Park 变换得到 Vα, Vβ;然后经过 SVPWM 算法得到 Va, Vb, Vc,最后输入到电机三相
上。这样就完成了一次电流环的控制。
剩余16页未读,继续阅读
资源评论













