论文研究-基于Matlab神经网络控制仿真研究 .pdf
需积分: 43 69 浏览量
2019-08-15
13:45:22
上传
评论
收藏 239KB PDF 举报

http://www.paper.edu.cn
1
基于 Matlab 神经网络控制仿真研究
袁 健,张文霞
(青岛科技大学 自动化与电子工程学院,山东 青岛 266042)
摘 要:介绍了基于神经网络的直接逆控制和模型参考自适应控制的基本原理,然后把它应
用在一个简单的二阶系统控制中,并对其进行了仿真,该仿真是使用 MATLAB 神经网络工具
箱完成的。最后对比了不同的控制方法以及不同的训练样本容量对控制结果的影响。
关键词:神经网络 直接逆控制 模型参考自适应控制
1.简介
近年来,随着社会经济的发展,对控制系统的设计要求日益提高,传统的控
制理论及传统的智能控制方法已经很难满足需要。神经网络控制一起独特的优点
受到控制界的关注,在控制系统中得到日益广泛的应用,这主要来自以下三方面
的动力:处理越来越复杂系统的需要;实现越来越高的设计目标的需要;在越来
越不确定情况下进行控制的需要。用神经网络设计的控制系统,具有高度的自适
应性和鲁棒性,对于非线性和不确定性系统也取得了满意的控制效果,这些效果
是传统的控制方法难以达到的
[1]
。
本文对一简单的二阶系统分别采用了直接逆控制和模型参考自适应控制,通
过仿真来分析其控制效果。并研究了不同样本容量对仿真结果的影响。
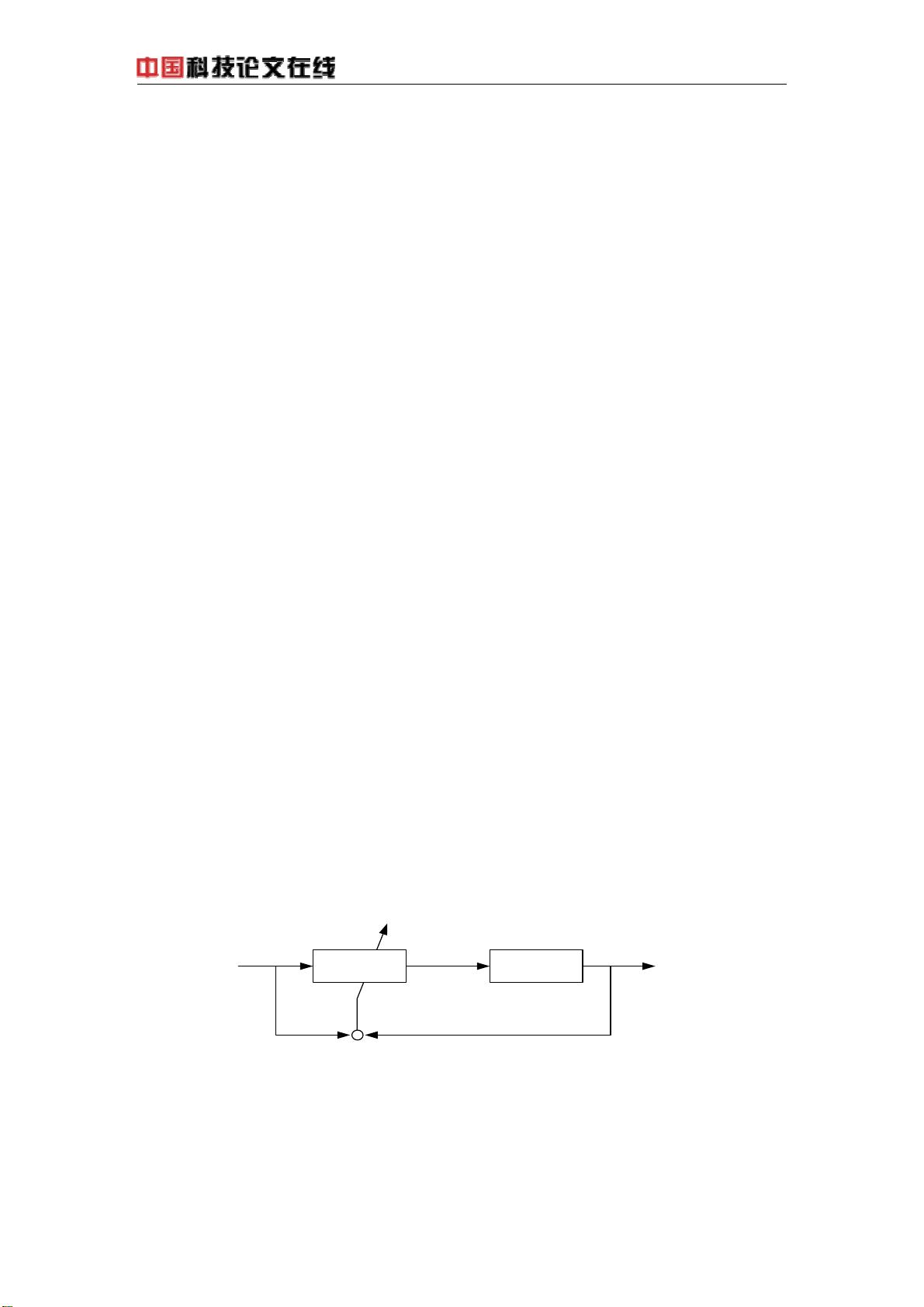
2. 直接逆控制原理
这种方法是将神经网络直接作为控制器串联于实际系统之前,其系统结构如
图 1 所示。它的主要思想是利用神经网络的逼近能力对系统的逆动态进行建模,
以使得整个系统的输入输出为恒等映射,从而实现高性能的控制。该方法结构简
单,可充分利用神经网络的建模能力,但系统的初始响应取决于网络的初始权值,
控制开始投入时系统鲁棒性欠佳
[2]
。系统控制特性取决于模型的精确程度,当模
型存在误差或对象有扰动时,容易造成系统不稳定。直接逆动态控制的原理可描
图1 神经网络直接逆控制
Fig.1 Neural network direct inverse control






评论0
最新资源