论文研究-基于机器视觉的关节机器人的研究 .pdf
需积分: 0 47 浏览量
2019-08-27
12:00:43
上传
评论 1
收藏 777KB PDF 举报


http://www.paper.edu.cn
基于机器视觉的关节机器人的研究
张凯良,张铁中,杨丽
中国农业大学工学院(100083)
E-mail:zhang_kailiang@eyou.com
摘 要:果蔬采摘机器人的研发在一些作业领域已十分迫切,而机器视觉技术和关节型机器
人机构在果蔬采摘领域又有着很大的应用价值。本课题从实际需要出发,对基于机器视觉的
关节机器人进行了研究。以实现关节机器人的末端机构对目标物体的捕获为目的,把寻求并
验证适宜的解决方案作为重点,将研究内容具体划分为三个部分: 1.机械结构的研究:设
计加工了四自由度关节型机器人本体。具有刚性好、运动平稳、定位准确的特点。2.机器
视觉的研究:设计了“手-眼”结构的单目视觉系统。取得了良好的试验效果并具有成本低、
通用性好的特点。3.运动控制的研究:设计了基于 PC 机的运动控制系统和基于“手-眼”
视觉系统导航的运动轨迹规划方法。
关键词:采摘,关节机器人,机器视觉,PC 机控制
1.引言
鉴于当今世界机器人技术的发展和我国农业的现状,果蔬采摘机器人的研发在一些作业
领域已十分迫切,而机器视觉技术和关节型机器人机构在果蔬采摘领域又有着很大的应有价
值,因此本课题从实际需要出发,对基于机器视觉的关节机器人进行了研究。以实现关节机
器人的末端机构对目标物体的捕获为目的,把寻求并验证适宜的解决方案作为重点,将研究
内容具体划分为三个部分:机械结构的研究、机器视觉的研究、运动控制的研究。
[1]
2.机器人机械本体结构的研究
2.1 机器人本体结构方案对比与选择
机器人操作机本体按照坐标形式大致可分为四类,即:直角坐标型、圆柱坐标型、球坐
标型和多关节型。其中,多关节型机器人以其结构紧凑、工作范围大、占用空间小、动作灵
活以及具有很高的可达性等特点,在各生产领域已得到广泛应用,本课题亦采用这种结构形
式的机器人操作机。
多关节型机器人常用的传动方式有:链传动、多级齿轮传动、蜗轮蜗杆传动。蜗轮蜗杆
传动方式具有结构紧凑、工作平稳、无噪声、冲击震动小、能得到很大的单级传动比以及反
行程自锁的特性,因而被本课题所采纳。
在经过了多方面的对比之后,本课题选定了以步进电机驱动、蜗轮蜗杆传动的多关节型
机器人的机器人本体结构方案。[2]
2.2 关节型机器人具体机械结构和相关参数的设计
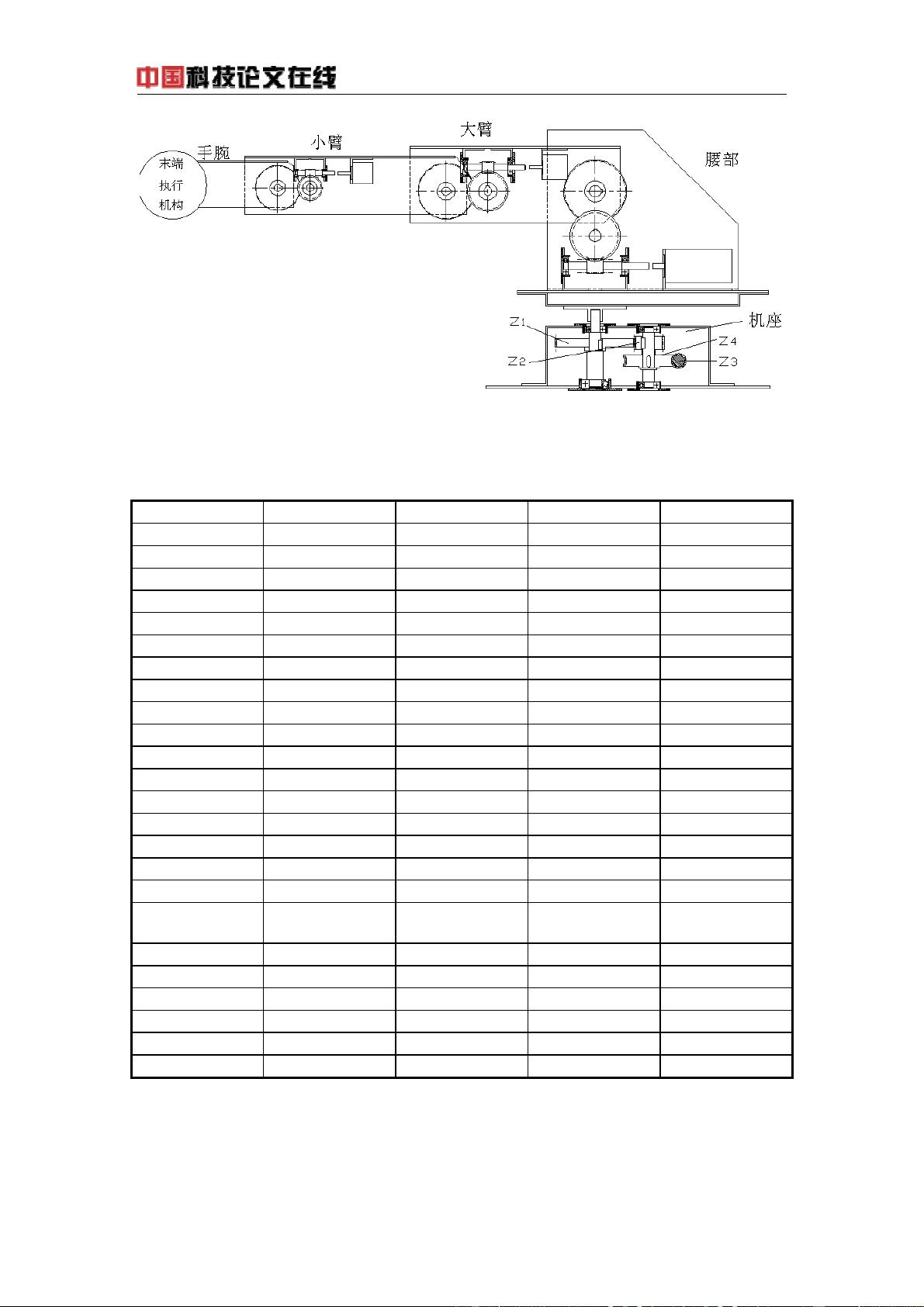
在课题中,考虑到果蔬采摘,尤其是草莓采摘的实际需要,将关节机器人除末端执行器
外的自由度设计为 4,它们分别是四个串连且分别独立的机器人转动关节(参见图 1),即:
①腰部水平面内转动关节;
②大臂肩关节竖直平面内转动关节;
③小臂肘关节竖直平面内转动关节;
④手腕腕关节竖直平面内转动关节。
- 1 -

剩余12页未读,继续阅读
资源评论


weixin_39840914
- 粉丝: 435
- 资源: 1万+











