
Robostar
RobostarRobostar
Robostar
2~4
2~42~4
2~4轴
轴轴
轴(CE) TEACHING
(CE) TEACHING(CE) TEACHING
(CE) TEACHING
A. TEACH PENDANT
A. TEACH PENDANT A. TEACH PENDANT
A. TEACH PENDANT 说明
说明说明
说明
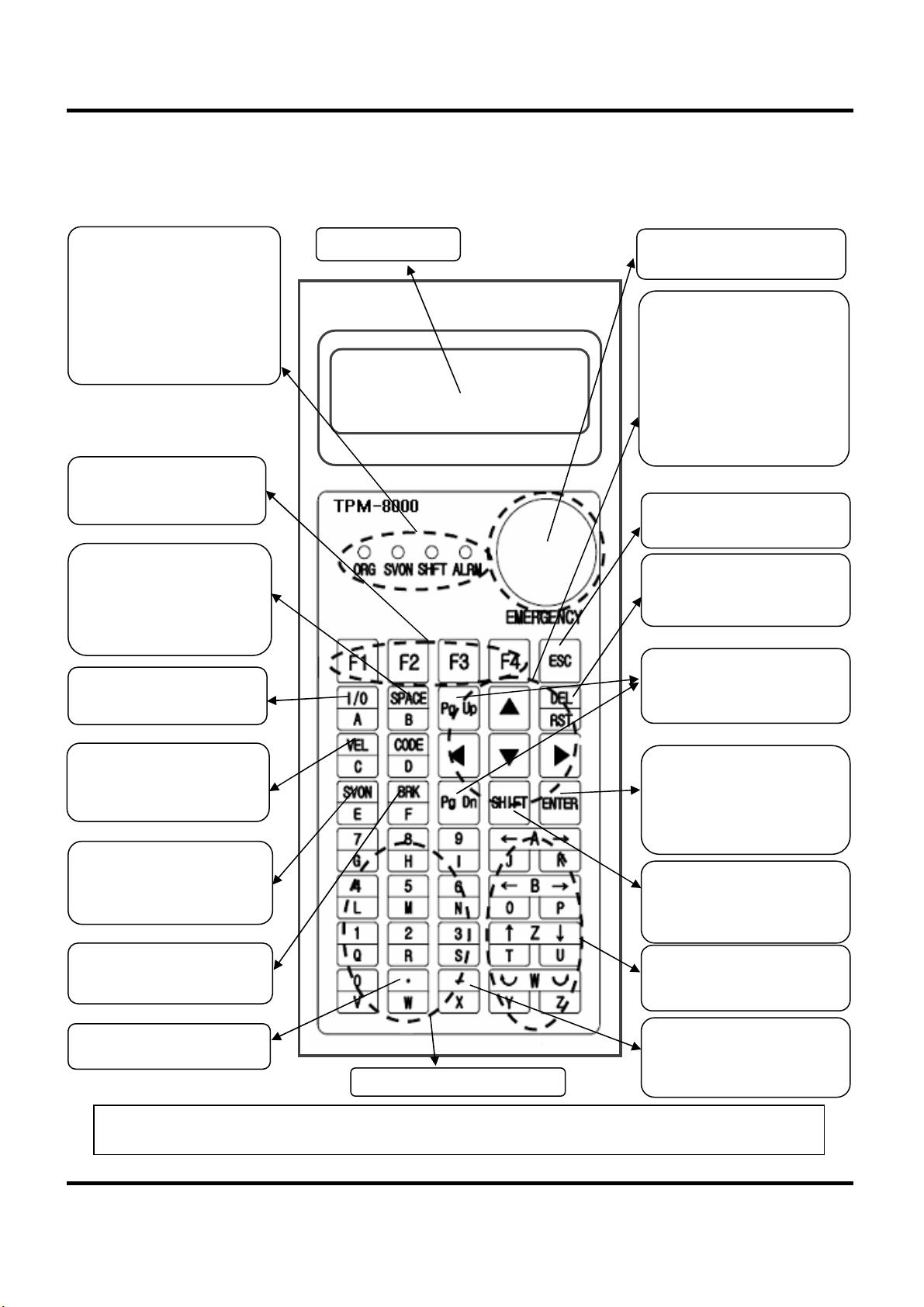
TEACH-PENDANT
TEACH-PENDANT TEACH-PENDANT
TEACH-PENDANT
液晶(LCD)显示画面
F1 F2 F3 F4
☞ 指示灯表示机器人的状态
ORG :原点复位完成时亮灯
SVON :按SVON键亮灯
SHFT :此灯亮时可以输入英文字母
ALRM :机器人有异常时亮灯
☞功能键(Function)
▷ 选择显示画面(LCD)的菜单。
▷ 运行中可以监控 I/O,内部接点。
☞ 修改,删除,移动程序时设定区间
。
☞ 点位提取<CURR>画面,选择点
动,连续移动键。
▷ 在点位提取<CURR>画面,可以设
定3阶段的速度。
▷ 运行中确认各轴的电机速度(rpm)。
▷ 在点位提取<CURR>画面,SERVO
ON/OFF。
☞ RUN 중 토크값을 모니터링
할 수 있음.
▷ 在点位提取<CURR>画面,把Z轴的
BRAKE ON/OFF。
☞ 프로그램 수정시 edit 모드로
변경 (e↔i)
☞ 紧急停止键,断开MOTOR电源.
☞方向键
- 画面上的光标按箭头方向移动。
- 按模式方向键的用法不同。
比如, 在JOB 模式编写程序时,
- 在一个画面只能显示4个命令语句,
需要查看其他语句时可以用方向键
查看。
☞ 退出键 (Escape)
- 退到以前状态模式时使用。
☞ RESET/删除键 (Reset/Delete)
▷ 解除报警状态。
▷ 删除输入错的文字,数字,命令。
☞ PgUp 键是向上翻页, PgDn键向下
翻页,
☞提取点位时利用翻页键可以增减
(Up/Down)点位的编号。
☞ Enter 键
▷ 用于输入所要的数据时。
▷ 根据模式用法不同。
比如,参数模式 → 每次按键符号改变,
JOB 模式 → 编写程序时用于命令输入
。
☞ Shift 键
▷ 用1个键完成2种功能时使用。
▷ 按Shift键如果操作板右上的 SHIFT
LED(指示灯)
☞ 点动键
▷ 按键则机器人按箭头方向移动。
11) 文字键
▷ 输入JOB名称或在命令语句中输入
变数名,标记名,副命令语句时使用。
9) 数字及符号键
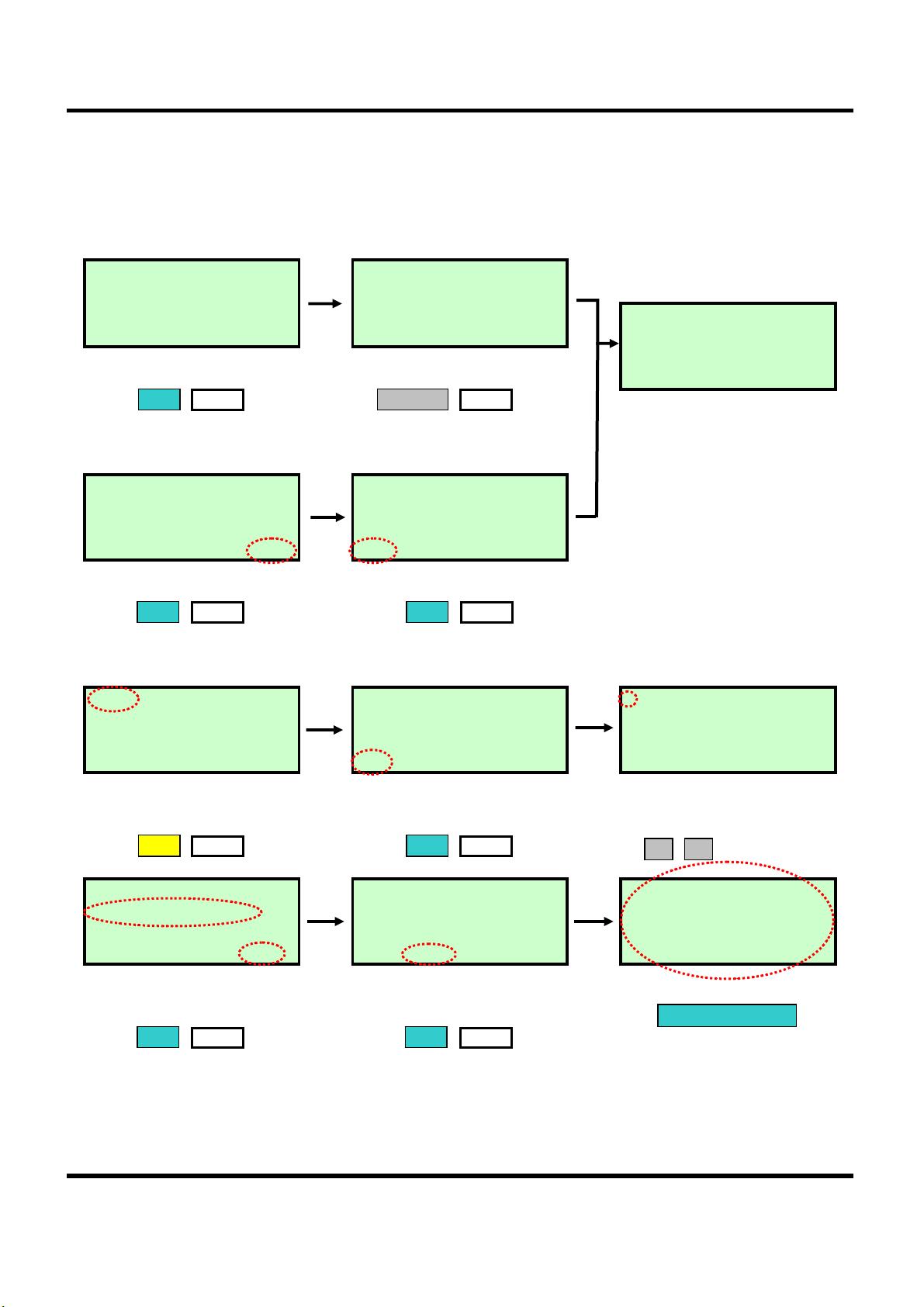
☞ 其他功能
-, 同时按EMERGENCY 健和[F1]健 → 重新启动(RE-BOOTING).
1Page
1Page1Page
1Page
剩余8页未读,继续阅读
资源评论













