

第 卷 第 期
年 月
南京理工大学学报
收稿日期: 修回日期:
基金项目:国家自然科学基金
作者简介:常宝娴女讲师主要研究方向排队论智能信息处理和模式识别
通讯作者朱俊武男博士教授主要研究方向多 系统本体论及机制设计等
引文格式:常宝娴丁洁朱俊武等 未知环境下机器人 学习覆盖算法 南京理工大学学报
投稿网址:
未知环境下机器人 Q 学习覆盖算法
常宝娴
,丁 洁
,朱俊武
,章永龙
,
南京工业大学 理学院江苏 南京 扬州大学 信息工程学院江苏 扬州
南京航空航天大学 计算机科学与技术学院江苏 南京
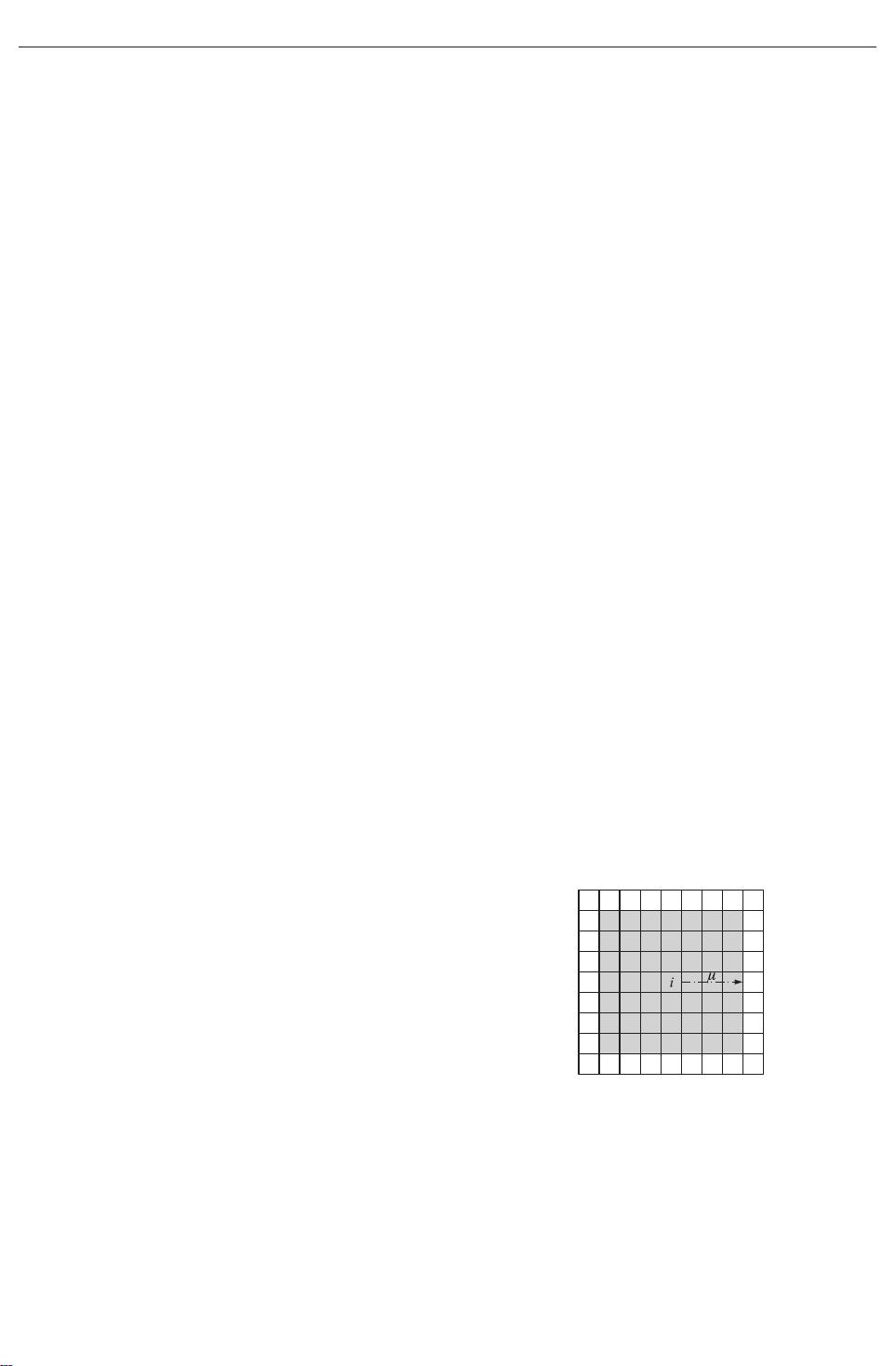
摘 要:为提高未知环境下机器人区域覆盖率,提出一种 学习覆盖算法( )。 对环境建
立栅格模型,在栅格地图中随机部署机器人和障碍位置。 机器人根据 自主学习得到的
指导其后续的动作选择和路径规划,减少了机器人移动次数。 从机器人数目、环境等方
面分析了各类参数变化对该算法的影响。 仿真实验结果表明:与随机选择覆盖算法对比,
在完成覆盖的执行步数及冗余效果等方面均有明显优化。
关键词:未知环境;学习覆盖算法;机器人;区域覆盖;栅格模型
中图分类号: 文章编号:()
Robot Q-learning coverage algorithm in unknown environments
Abstract
Key words
剩余8页未读,继续阅读
资源评论


weixin_38674050
- 粉丝: 5
- 资源: 981









最新资源
- 算法竞赛中的离散化 概念总结和基本操作全解
- 算法竞赛位运算(简单易懂)
- 常用一维二维 前缀和与差分算法模板总结
- SAR成像算法+后向投影(BP)算法+星载平台实测数据
- 横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横向循环焦点轮播图横
- 基于Java和HTML的留言墙、验证码、计算器基础项目设计源码
- 基于JAVA C/C++的嵌入式设备组网平台物联网框架设计源码
- 基于Java开发的高性能全文检索工具包jsearch设计源码
- 基于多语言技术的pt遨游助手手机版设计源码
- 基于若依框架的染云盘V1.0.2设计源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


