基于STM32的逐阳帆控制系统设计
180 浏览量
2020-10-17
03:12:08
上传
评论
收藏 326KB PDF 举报

基于基于STM32的逐阳帆控制系统设计的逐阳帆控制系统设计
针对传统太阳能跟踪系统现场调试复杂、可靠性不够高的问题,提出一种基于STM32的太阳能跟踪系统设计。
该系统为单轴跟踪系统,通过获取太阳能板的地理位置和当前时间信息用一定算法算出太阳的方位角,驱动电
机,实现对太阳的跟踪;采用基于ZigBee技术的无线通讯系统,具有群簇控制能力,简化现场调试过程;通过
ModBus协议实现控制系统信息上报,便于后台管理;提供多种工作模式,提高系统的抗风、抗雪性能;通过在
控制芯片片内Flash写入备份程序,保证系统主程序出现问题后,系统跳转至备份程序继续运行,提高系统的可
靠性。
0 引言引言
太阳能作为一种清洁、可持续发展的新能源,目前已经被大量利用。由于在同一地理位置观测到的太阳方位角时刻处于变
化当中,导致固定支架式太阳能电池板发电量较低。目前,国内部分光伏电站已经大量采用可跟踪式太阳能支架。光伏电站一
般建于人烟稀少的荒漠地区,占地面积大,系统维护较为困难,对跟踪支架控制系统的可靠性和调试便利性提出了要求。文献
[1]提出的高精度太阳能跟踪控制器解决了太阳跟踪精度的问题,但是控制功能单一,实用性不强。文献[2]提出的控制系统实
用性较强,有大风天气的保护模式,但是系统维护升级复杂,同时因为没有备份系统程序,一旦程序出现不可恢复性问题,系
统就不能正常工作,可靠性不高。
针对以上方案存在系统维护升级困难、可靠性不高的问题,本文提出的基于
1 系统原理系统原理
系统采用ST公司的STM32F103ZET6为主控芯片,外部挂载GPS模块、角度传感器、EEROM、ZigBee模块以及独立键
盘。系统通过GPS模块获取当前经纬度值,通过读取STM32内部的时钟模块,计算出当前时间值,并通过经纬度和时间值计
算出太阳方位角。系统通过读取角度传感器获取当前太阳能板的方位角度值,计算出太阳当前的方位角与太阳能板倾斜角的角
度差,再根据该差值驱动电机将太阳能板转动一定角度。由于光伏电站一般建于人烟较少的地区,维护比较困难,所以对太阳
追踪系统的稳定性要求较高。本系统通过对片内Flash进行分区,将片内512 K Flash分为BootLoader程序区、主程序区和备份
程序区,保证系统在主程序卡死时能够跳转到备份程序区继续运行,从而提高了系统的稳定性。由于光伏电站占地面积太大,
动辄多达1到2平方公里,动用人力来对区域内所有设备进行升级维护工作量太大,本系统通过ZigBee技术实现了区域内无线
网络覆盖,使维护人员在一台设备上即可对网内任一设备进行无线升级,减少了工作量。为了方便光伏电站对
2 系统硬件设计系统硬件设计
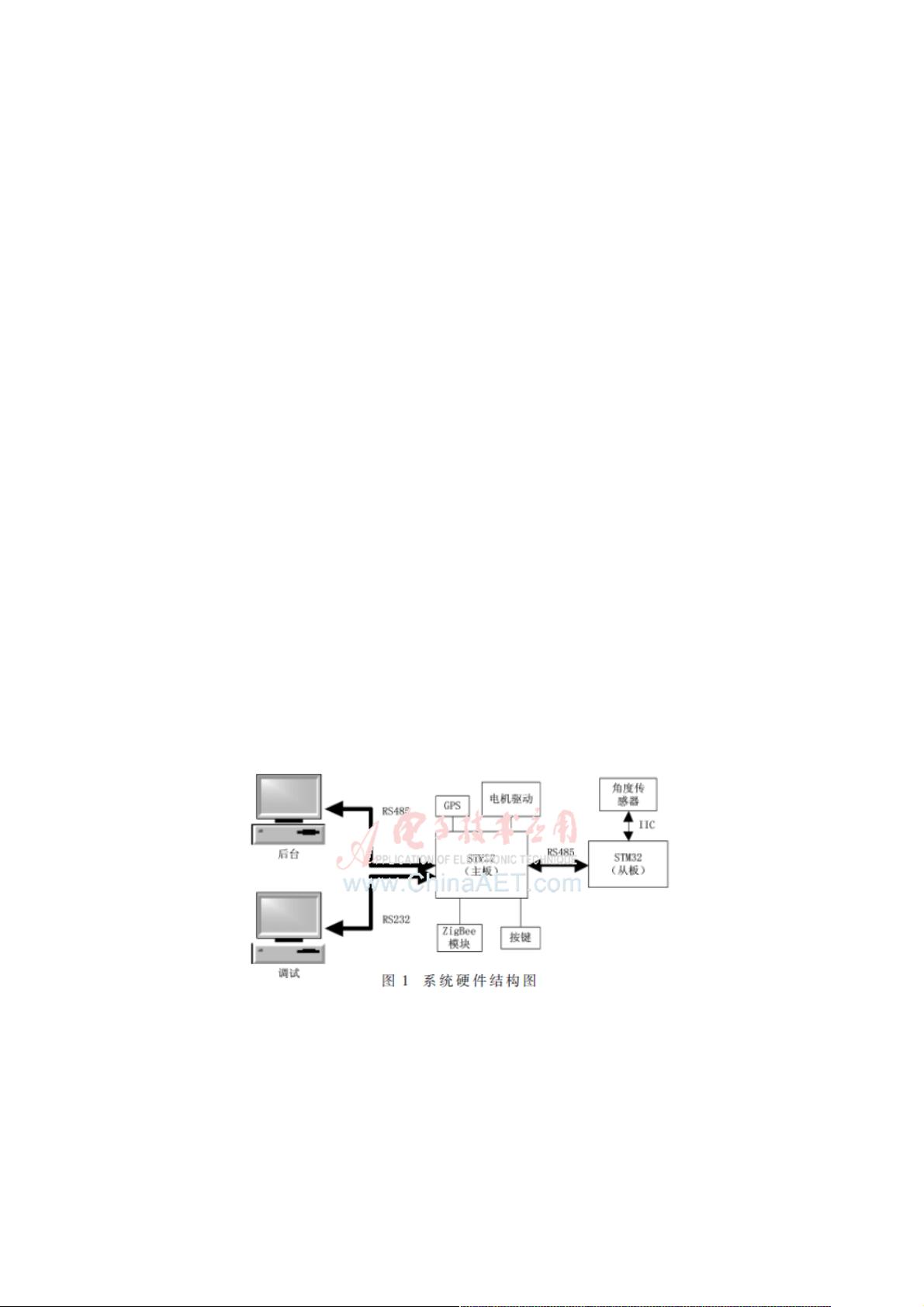
系统分为主板和从板,主板安装在电控柜,用于控制三相交流电机。从板安装于斜单轴主梁上,外部挂载角度传感器,用
于获取角度信息。主板与从板通过RS485串行总线通信。主板的串口1用于获取GPS信息,串口2用于与ZigBee模块通信。串
口3和串口4接RS485接口。串口5接RS232接口。电机驱动采用三相交流电机正反转模块。为了扩大ZigBee的通信范围,系统
通过CC2592进行功率放大。按键采用自锁式按键开关。系统硬件结构图如图1。
3 系统软件设计系统软件设计
3.1 从板软件设计从板软件设计
从板用于采集太阳能板当前方位角度值并通过RS485总线反馈给主板。从板的程序流程图如图2。






评论0
最新资源