
图
!
采用固定点切换
"
软过渡方法切换的电压和电流波形片段
(
!
)
图
#
采用固定点切换
"
软过渡方法切换的电压和电流波形片段
(
"
)
$
结
语
在
#
函
数的基础上对交
-
交
变频平滑过渡的过
程进行了仿真
,
并对
2
种
切换过程进行了对比
,
从
多个方面进行了分析
。
在
"
种
切换过程中
,
电压电
流都是在切换后第
1
个
周期内出现了少许畸变
,
但
转速和转矩出现了较明显的差别
。
仿真结果说明采
用的固定点切换结合软过渡的方法效果较好
,
能够
减小冲击
、
平滑过渡
,
并且获得了较为理想的过渡
时间
,
转速也呈现出匀加速上升的良好状态
。
参
考文献
:
[
1
]
杜
庆楠
,
王新
$
晶
闸管相控变流器的双变量相控理论
[
M
]
$
北
京
:
煤炭工业出版社
,
"%%&$
[
2
]
王
兆安
,
黄俊
$
电
力电子技术
[
M
]
$
’
版
$
北
京
:
机械工业出版社
,
"%%%$
[
3
]
杨
树德
,
高曼曼
,
周斌
,
等
$
闭环交流调速系统的
#
函
数辅助设计
[
(
]
$
煤
矿机械
,
"%!!
,
)"
(
!%
)
:
’!*’)$
[
4
]
徐
高杰
,
张迪凡
$
双
变量交
*
交变频过渡方式研究
[
(
]
$
煤
矿机电
,
"%!%
(
&
)
:
+!*+’$
作
者简介
:
李高举
(
!,-&
*
)
,
河南焦作人
,
河南理工大学控制理
论与控制工程专业在读硕士研究生
,
研究方向为电力电子与电气传
动
,
电子信箱
:
./01234!")5!"&$627$
责
任编辑
:
卢盛春 收稿日期
:
20!"-%,-!&
!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
煤
矿 机 械
82
1. 9/:; 916</:;=>
?2.$3’
@2$%)
91=$ "%!)
第
)’
卷
第
%)
期
"%!)
年
%)
月
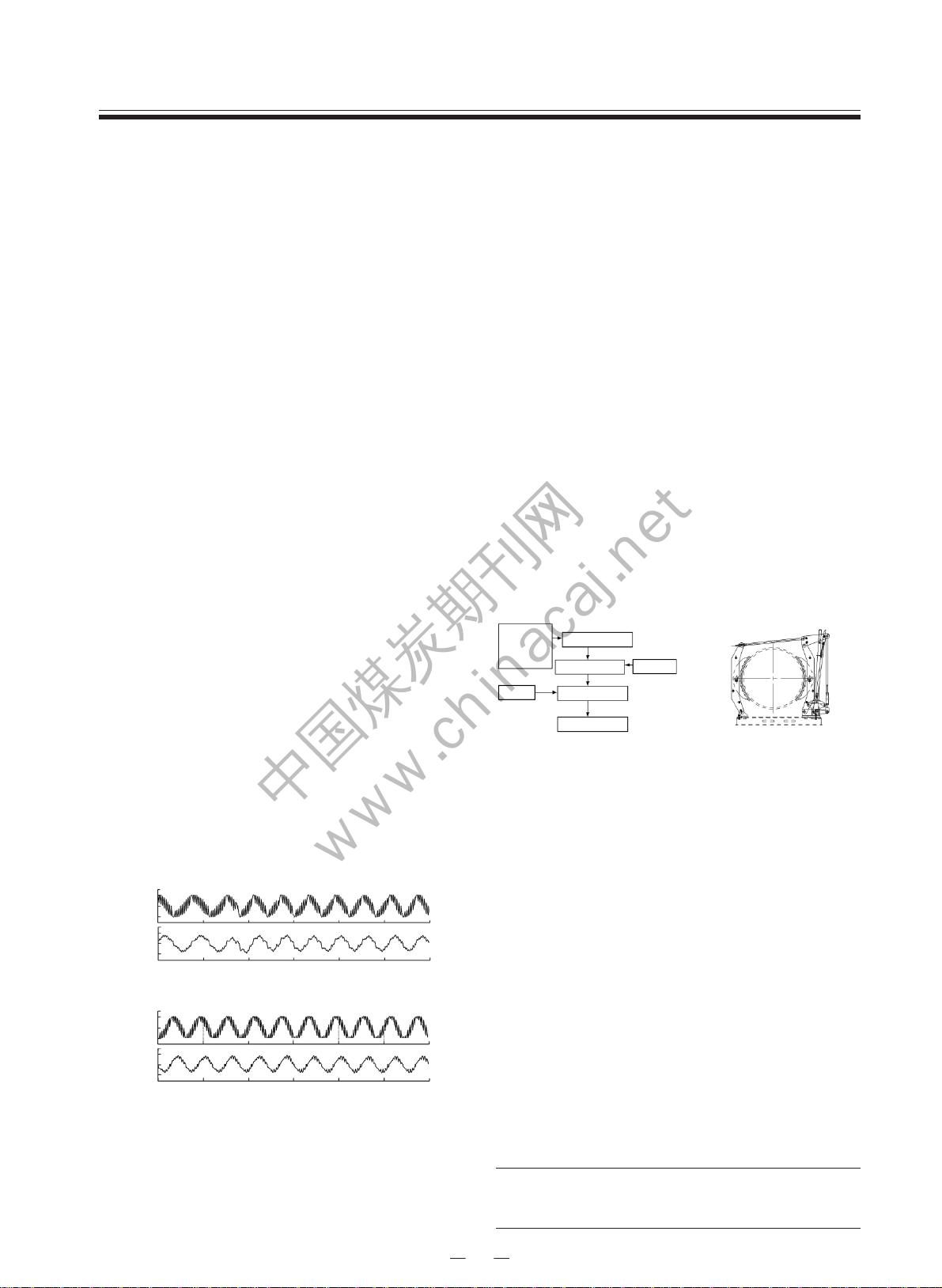
%
运
动仿真流程
A
=2BC
的
运动仿真是一个基于时间的运动形式
。
机构在指定的时间段中运动
,
并同时对指定时间段
中的步数进行运动分析
。
机构运动可把静态设计转
换为活动的虚拟原型
,
并借助运动仿真观察其动作
状态
。
工程师可以对机构的数字化原型进行更高级
的交互式处理
,
实时地评估设计
,
缩短产品的开发
周期
,
从而实现真正的产品创新
。
另外
,
通过运动回
放
,
检查运动是否达到设计要求和运动中各种运动
部件是否发生干涉
。
其流程如图
!
所
示
。
&
调
试绞车制动装置工作原理
绞车上有
"
个
制动装置
,
分别安装在滚筒和离
合闸轮上
,
其结构尺寸及动作原理完全相同
。
由闸
臂带动闸瓦来制动滚筒
。
在离合闸轮上的制动装
置
,
具有摩擦离合器的作用
。
当离合闸轮被完全刹
紧时
,
内齿圈带动滚筒工作
。
推动操纵杆带动刹车
机构运动
,
使闸臂作相向运动带动闸瓦
,
完成制动
。
如图
"
所
示
。
图
%
动态模拟的基本流
程 图
&
调度绞车制动装置
’
装
配与仿真
(
1
)
虚
拟装配
A
=2BC
软
件采用的是虚拟装配模式
,
即装配件中
的零件与原零件之间是指针引用链接关系
,
对原零
件的修改会自动反映到装配件中
。
在此环境下通过
基于
A
=2BC
的调度绞车制动装置的运动仿真
孟
超
!
,
王
珊
!
,
李
晨阳
"
(
!$
焦
作大学 机电工程学院
,
河南 焦作
’+’%%)
;
"$
上
海交通大学 船建学院
,
上海
"%%"’%
)
摘
要
:
根据调度绞车制动装置的特点
,
利用
A
=2BC
软
件对其进行了装配设计和运动仿真
,
并
通过结果分析可以为制动装置的精确及优化设计提供一定的参考
。
关键词
:
绞车制动装置
;
A
=2BC
;
运
动仿真
中图分类号
:
D
E+)’
文
献标志码
:
F
文
章编号
:
1003
- 079’
(
2
01)
)
%) -
00&- - %"
!"#$"%
&$’()*#$"% "+ ,$-.*#/0$%1 23%45 67*83%1 ,9:3/9 6*-9; "% A=2BC
<=>?
@5A"
!
,
2BC?
D5A%
!
,
EF
@5G%HIA%J
"
G!$
82..;0; 2H 9;6<1:/61. 1:I C.;6J=/61. C:0/:;;=/:0K (/12L42 M:/N;=O/J>K (/12L42 ’+’%%)K 8</:1
;
"$
82..;0; 2H P21J
P4/.J
,
#<1
:0<1/ (/12J2:0 M:/N;=O/J>
,
#
<1:0<1/ "%%"’%K 8</:1Q
B
K-#7A4#L F662=I/:0 J2 J<; 6<1=16J;=/OJ/6O 2H J<; I/OR1J6</:0 S/:6< T=1U/:0 I;N/6;V J<; 1OO;7T.>
I;O/0: 1:I 72J/2: O/74.1 J/2: 1=; I/O64OO;I /: I;J1/. T> 4O/:0 A=2BC$ F .O2V J<; =;O4.J 1:1.>O/O 61:
R=2N/I; 6;=J1/: =;H;=;:6; H2= J<; 1664=1J; I;O/0: 1:I 2RJ/7/L1J/2: 2H T=1U/:0 I;N/6;O$
MGI N"7O-L S/:6< T=1U/:0 I;N/6;W A=2BC O2HJS1=;W 72J/2: O/74.1J/2:
!$
, "$% "$! "$" "$) "$’
*+
%
+
*!%%
%
!%%
"$+
!$) !$’ !$+ !$& !$X !$- !$,
*+
%
+
*!%%
%
!%%
执
行电机
建立连接
连接轴设定
运动副
伺服电机
建立运动模型
设置运动环境
分析运动机构
获取分析结果
运动学
时
间
B
O
电压
B?
电流
BA
电压
B?
电流
BA
时
间
B
O
&-
DOI:10.13436/j.mkjx.2013.03.008
中国煤炭期刊网
www.chinacaj.net






评论0
最新资源