A deep belief network with PLSR for nonlinear system modeling
64 浏览量
2021-02-07
09:40:15
上传
评论
收藏 902KB PDF 举报


Neural Networks 104 (2018) 68–79
Contents lists available at ScienceDirect
Neural Networks
journal homepage: www.elsevier.com/locate/neunet
A deep belief network with PLSR for nonlinear system modeling
Junfei Qiao
a,b,
*, Gongming Wang
a,b
, Wenjing Li
a,b
, Xiaoli Li
a
a
Faculty of Information Technology, Beijing University of Technology, Beijing 100124, China
b
Beijing Key Laboratory of Computational Intelligence and Intelligent System, Beijing 100124, China
a r t i c l e i n f o
Article history:
Received 16 April 2017
Received in revised form 5 October 2017
Accepted 17 October 2017
Available online 31 October 2017
Keywords:
Deep belief network
Partial least square regression
Weights optimization
Nonlinear system modeling
Wastewater treatment system
a b s t r a c t
Nonlinear system modeling plays an important role in practical engineering, and deep learning-based
deep belief network (DBN) is now popular in nonlinear system modeling and identification because of
the strong learning ability. However, the existing weights optimization for DBN is based on gradient,
which always leads to a local optimum and a poor training result. In this paper, a DBN with partial least
square regression (PLSR-DBN) is proposed for nonlinear system modeling, which focuses on the problem
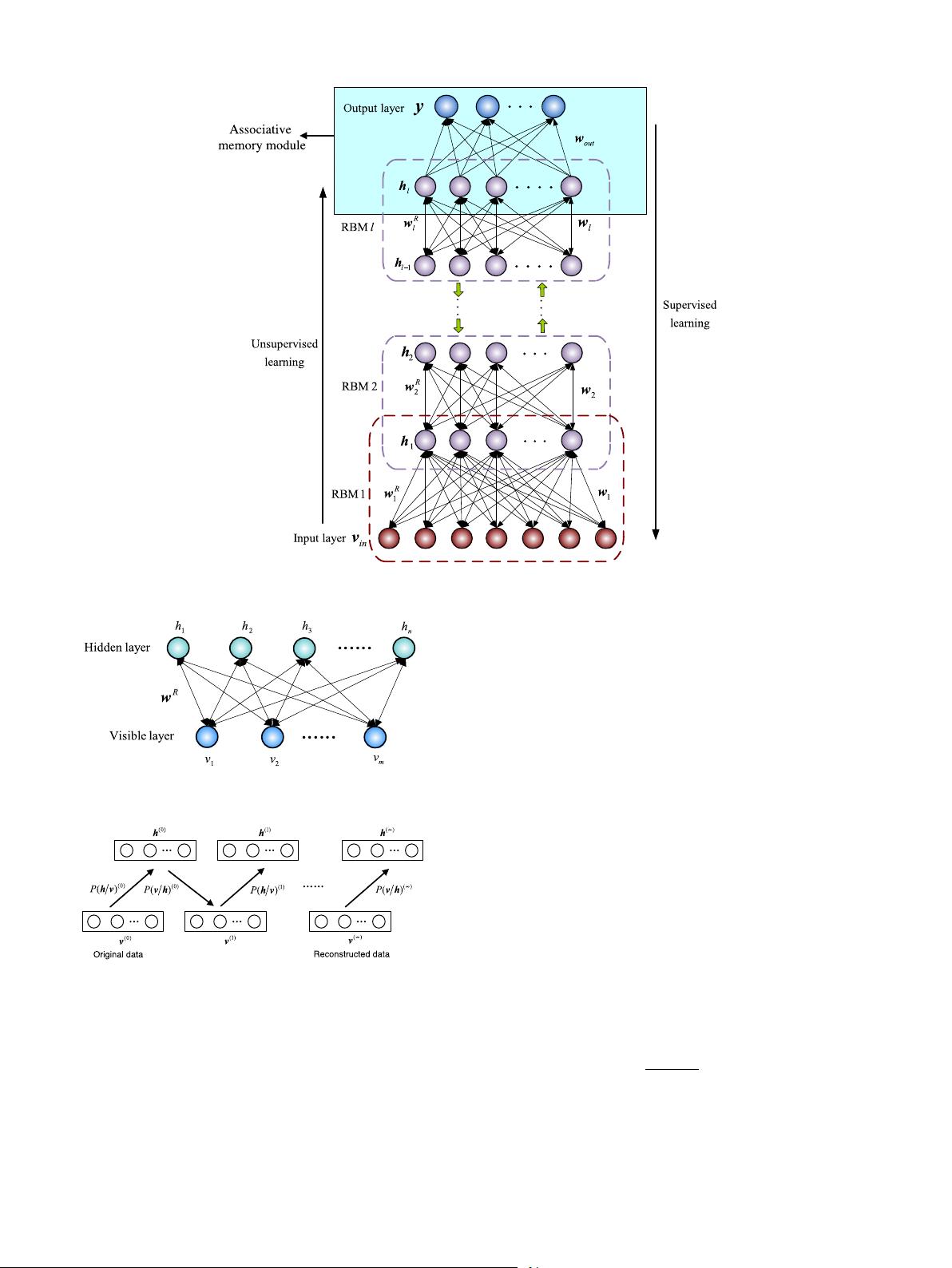
of weights optimization for DBN using PLSR. Firstly, unsupervised contrastive divergence (CD) algorithm is
used in weights initialization. Secondly, initial weights derived from CD algorithm are optimized through
layer-by-layer PLSR modeling from top layer to bottom layer. Instead of gradient method, PLSR-DBN can
determine the optimal weights using several PLSR models, so that a better performance of PLSR-DBN
is achieved. Then, the analysis of convergence is theoretically given to guarantee the effectiveness of
the proposed PLSR-DBN model. Finally, the proposed PLSR-DBN is tested on two benchmark nonlinear
systems and an actual wastewater treatment system as well as a handwritten digit recognition (nonlinear
mapping and modeling) with high-dimension input data. The experiment results show that the proposed
PLSR-DBN has better performances of time and accuracy on nonlinear system modeling than that of other
methods.
© 2017 Elsevier Ltd. All rights reserved.
1. Introduction
In the past several years, systems modeling has achieved great
progress because of great demands for controller design (Jia, Li,
& Wang, 2016; Martensson & Hjalmarsson, 2011; Qiao & Han,
2012), process analysis (Zhang, Chai, & Li, 2012) and soft computing
(Han, Chen, & Qiao, 2011; Han & Qiao, 2013). However, most
practical systems are nonlinear, especially industrial systems, and
the dynamic behavior of the systems cannot be described using a
linear model. In fact, it is difficult to model nonlinear systems due
to the existence of uncertainty, including structure and parameters
(Gandomi & Alavi, 2011). Therefore, nonlinear system modeling is
a significant and challenging work (Anderson & Kadirkamanathan,
2007), which has been attracting a lot of attention in many fields.
Theoretically, ANNs can approximate any nonlinear system to
any accuracy (Leung, Lam, & Ling, 2003; Scarselli & Tsoi, 1998).
As a result, ANNs have been widely used for nonlinear systems
modeling (Han, Wang, & Qiao, 2013; Li, Qiao, & Han, 2016). For
example, a self-organizing cascade neural network (SCNN) with
random weight is proposed for nonlinear system modeling (Li et al.,
*
Corresponding author at: Faculty of Information Technology, Beijing University
of Technology, Beijing 100124, China.
E-mail addresses: junfeiq@bjut.edu.cn (J. Qiao), xiaowangqsd@163.com
(G. Wang), wenjing.li@bjut.edu.cn (W. Li), lixiaolibjut@bjut.edu.cn (X. Li).
2016), and the modeling accuracy is improved to some extent. An
adaptive second order algorithm (ASOA) is developed to train the
fuzzy neural network (FNN) to achieve fast and robust convergence
for nonlinear system modeling (Han, Ge, & Qiao, 2016), and the
corresponding results are satisfactory. A hierarchical radial basis
function (HRBF) neural network is proposed for nonlinear system
modeling in wastewater treatment process (Han & Qiao, 2013), and
the corresponding performances of modeling and prediction are
both acceptable for the practical system. However, these methods
mentioned above only consider the single hidden layer architec-
ture, resulting in the lack of significant improvements for modeling
accuracy. From universal approximation theory, if the number of
hidden neurons is enough and even equal to the number of training
samples, a single hidden layer neural network can approximate
any nonlinear systems to any desired accuracy (Huang, Chen,
& Siew, 2006; Leung et al., 2003). However, a neural network
with the number of hidden neurons equal to training samples is
impractical, especially under the condition of numerous training
samples. Therefore, how to solve this contradictory problem is still
challenging for improving accuracy of nonlinear systems modeling.
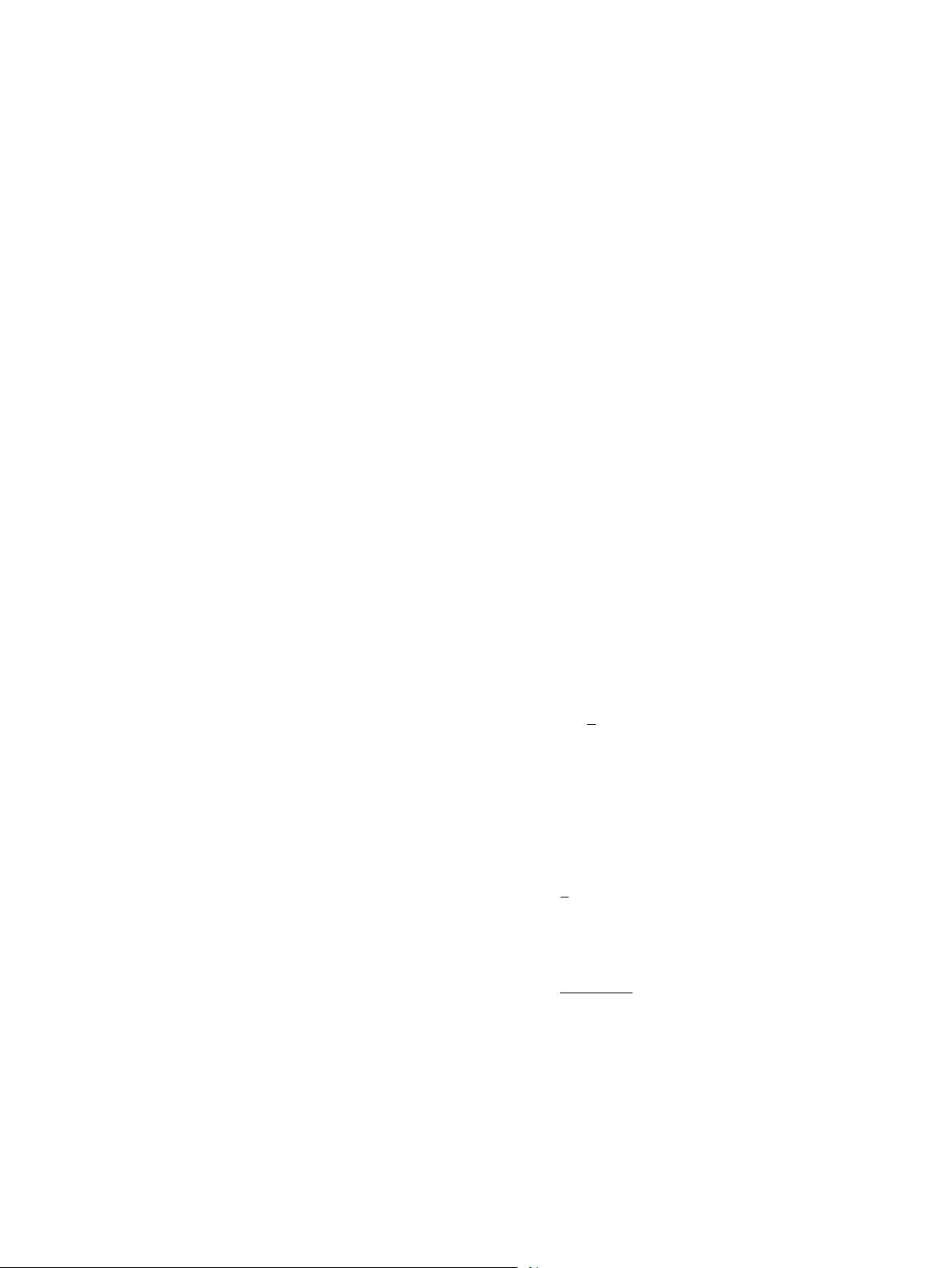
Recently, researches show that deep learning-based deep belief
network (DBN) can achieve any desired modeling accuracy with
less hidden neurons (Hinton, Osindero, & Teh, 2006; Rosa & Yu,
2016). DBN is a kind of neural network with a deep architecture
(several hidden layers), which features hierarchical representation
https://doi.org/10.1016/j.neunet.2017.10.006
0893-6080/© 2017 Elsevier Ltd. All rights reserved.
剩余11页未读,继续阅读
资源评论


weixin_38614825
- 粉丝: 6
- 资源: 951









最新资源
- 自动驾驶-状态估计和定位之Error State EKF.pdf
- STM32F103ZET6+北斗
- 程序流程图的说明及图形示例
- FDN5618P-NL-VB一款SOT23封装P-Channel场效应MOS管
- Go语言基础(变量和基本类型).zip
- 基于CYCLONE2 (EP2C8Q) FPGA 设计PLL锁相环设置时钟Verilog源码Quartus工程文件.zip
- FDN372S-NL-VB一款SOT23封装N-Channel场效应MOS管
- date0425111111111111111111111
- 包含贪心算法的定义及python代码部分实现
- 自动驾驶-状态估计和定位之扩展卡尔曼滤波.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


