
自平衡机器人的控制系统设计自平衡机器人的控制系统设计
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,
成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就
是说,自平衡机器人在静止状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过
一定的控制策略使它达到动态平衡。
引 言
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为移动式
机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就是说,自平衡机器人在静止
状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过一定的控制策略使它达到动态平衡。
由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱好者设计了多种结构、外观各异的自平衡机器人,尝
试采用各种控制策略使其达到自平衡控制。通常这类机器人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当
前机器人姿态控制伺服电机驱动电压的转向和转速,从而使机器人保持平衡。该方式制作的自平衡机器人虽然控制性能良好,
但成本高,不适合广泛推广。本文设计的机器人尝试采用
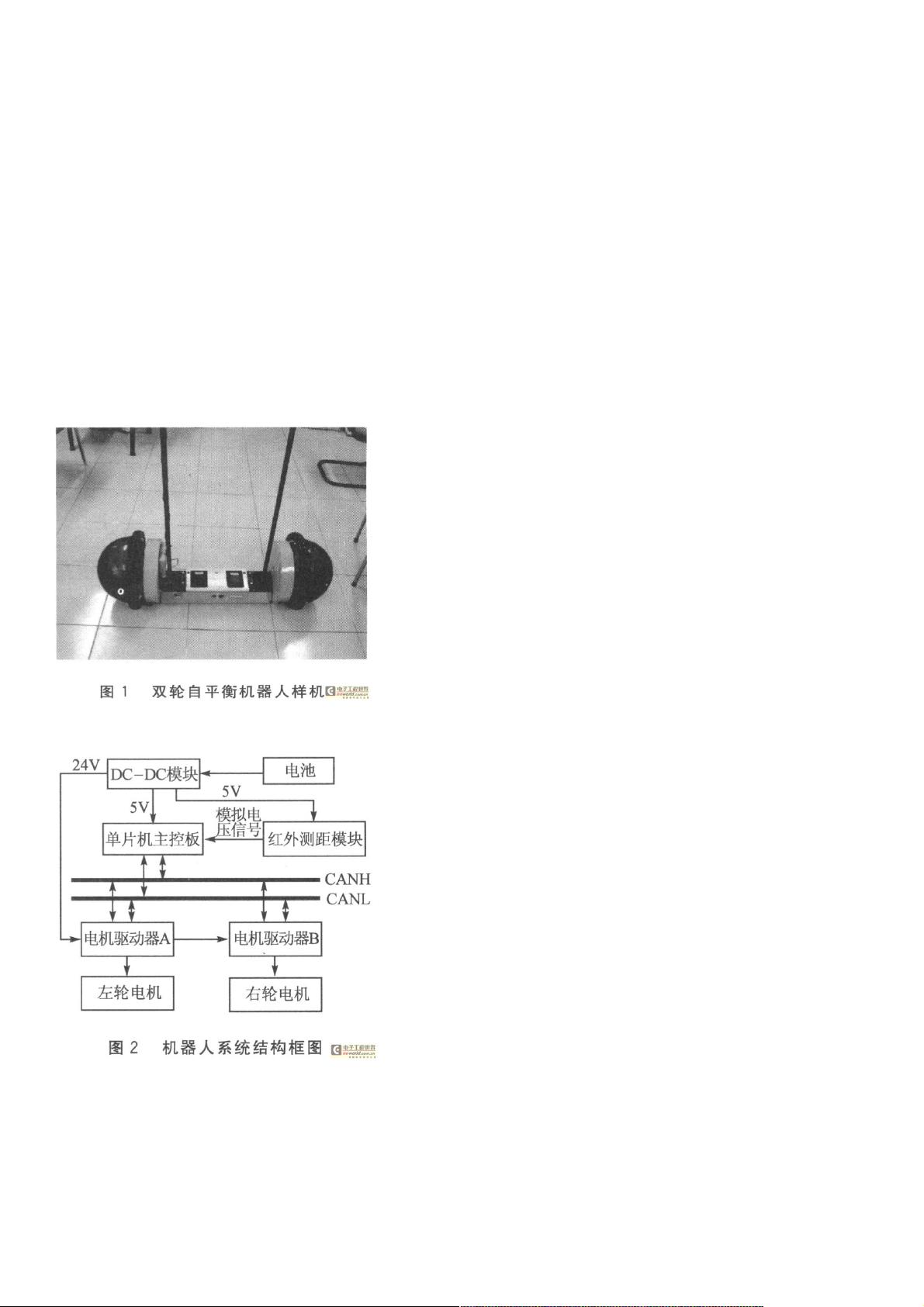
1 系统结构
本文设计的自平衡机器人系统主要由机械行走装置、
机械行走装置主要由车体平台、
2 姿态信息获取
机器人的姿态信息包括倾倒的角度和角速度。如图3所示,机器人左右两侧水平位置各安装有1个红外测距传感器,可以测
量与地面之间的距离d1和d2。当机器人在竖直状态时,左右传感器距离差为零。当机器人倾倒时,距离差与倾倒角度θ成函数
关系如下:
sin θ=(d2-d1)/D
资源评论













