learning from data 下半部


e-
CHAPTER
e-Chapter 6
Similarity-Based Methods
“It’s a manohorse”, exclaimed the confident little 5
year old boy. We call it the Centaur out of habit, but
who can fault the kid’s intuition? The 5 year old has
never seen this thing before now, yet he came up with
a reasonable classification for the beast. He is using
the simplest method of learning that we know of –
similarity – and yet it’s effective: the child searches
through his history for similar objects (in this cas e a
man and a horse) and builds a classification ba sed on
these similar objects.
The method is simple and intuitive, yet when we
get into the details, several issues need to be addressed
in order to arrive at a technique that is quantitative
and fit for a computer. The goal of this chapter is to build ex actly such a
quantitative framework for similarity based learning.
6.1 Simila ri ty
The “manohorse” is interesting because it requires a deep understanding of
similarity: first, to say that the Centaur is similar to both man and horse;
and, second, to decide that there is enough similarity to both objects so that
neither can be excluded, warranting a new class. A good measure of similarity
allows us to not only classify objects using similar objects, but also detect the
arrival of a new class of objects (novelty detection).
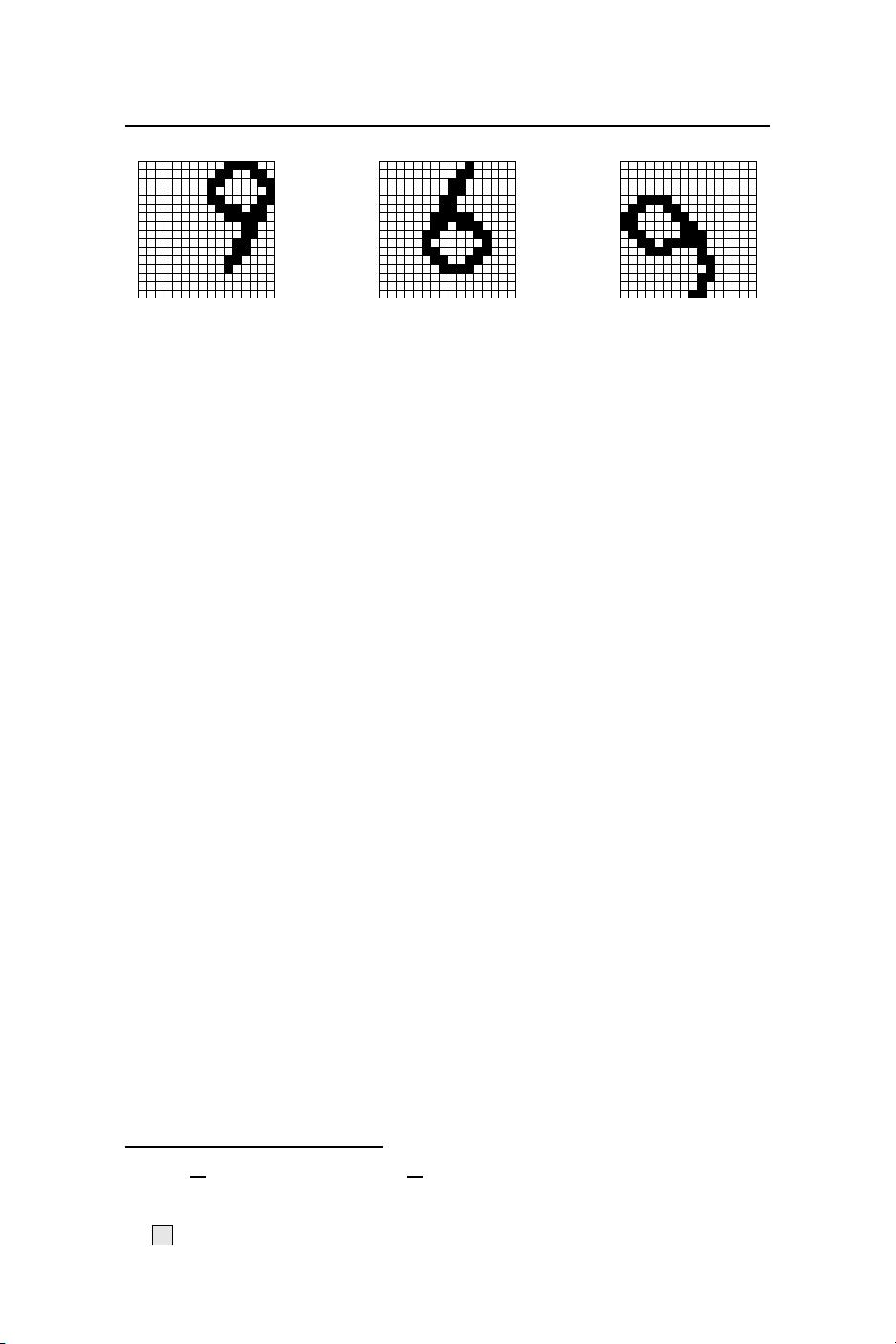
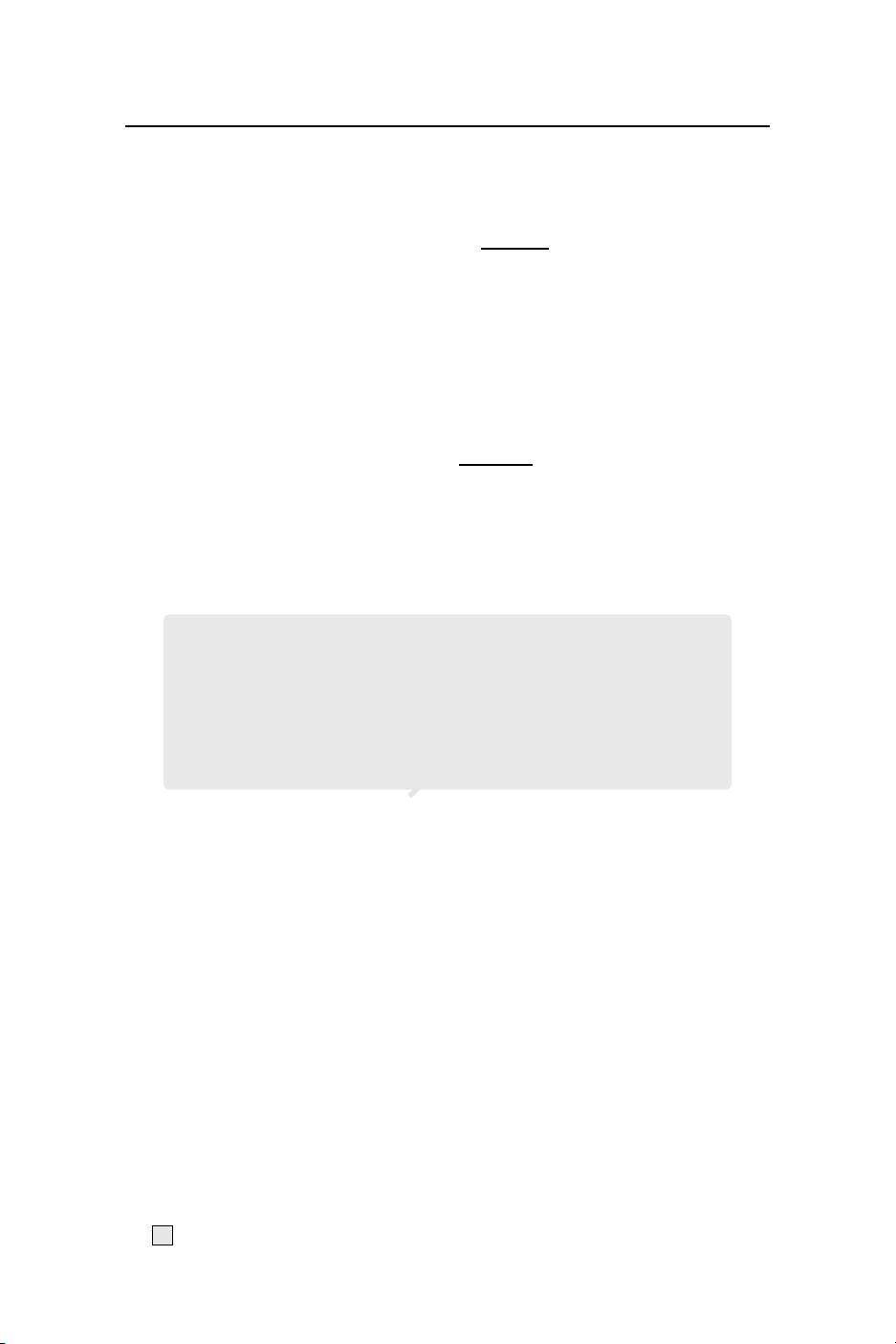
A simple classification rule is to give a new input the class of the most
similar input in your data. This is the “nea rest neighbor” rule. To implement
the nearest neighbor rule, we need to first qua ntify the similar ity between
two objects. There are different ways to measure similarity, or equivalently
dissimilarity. Consider the following example with 3 digits.
c
A
M
L
Yaser Abu-Mostafa, Malik Magdon-Ismail, Hsuan-Tien Lin: Oct-2014.
All rights reserved. No commercial use or re-distribution in any format.

剩余202页未读,继续阅读
资源评论

 microsheen2292016-10-26非茶国内不错,正在看呢
microsheen2292016-10-26非茶国内不错,正在看呢












