ESC32源码分析流程图解析

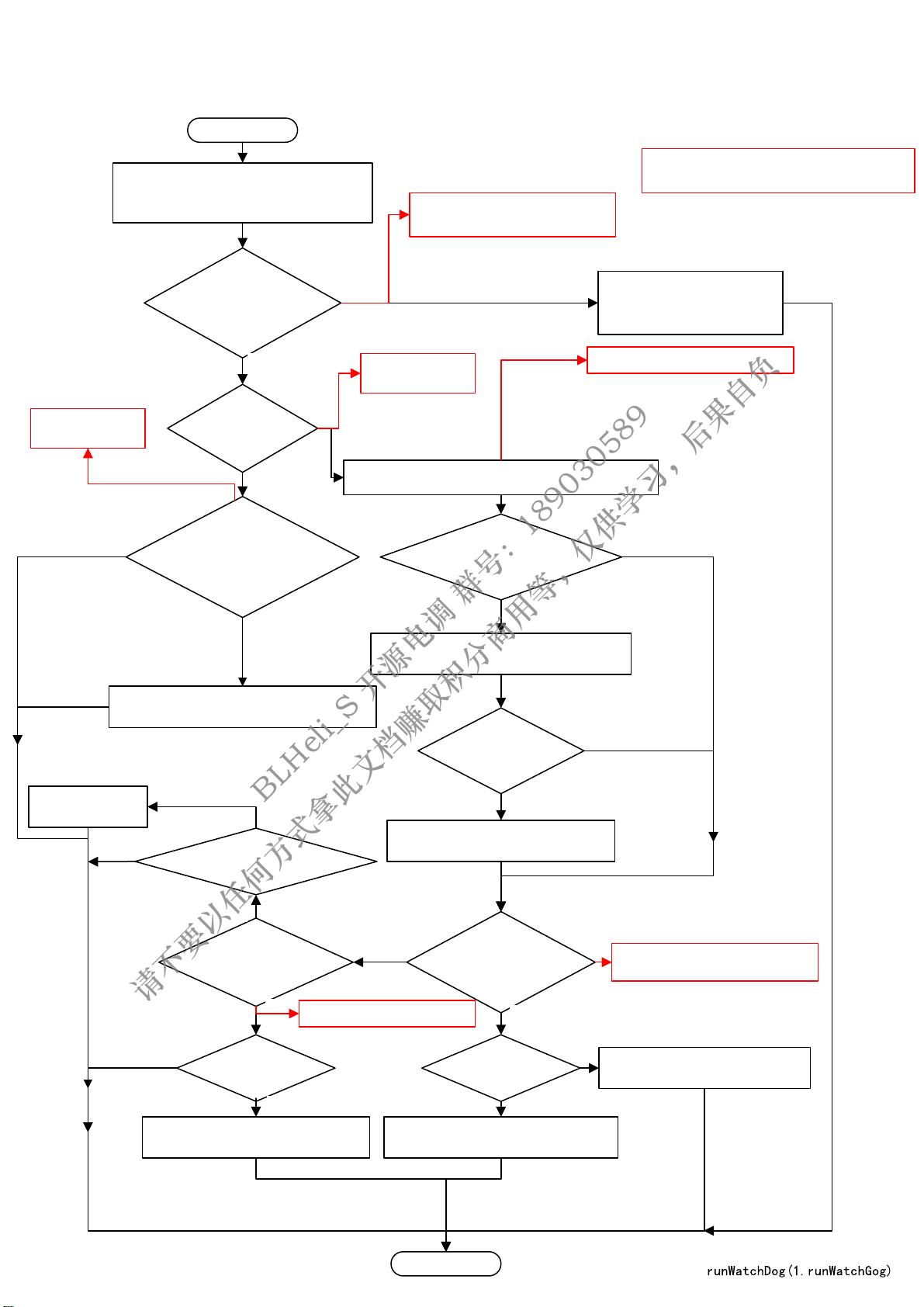
runWatchDog()
t = timerMicros; 当前时间戳
d = detectedCrossing; 过零时间戳
p = pwmValidMicros; 油门输入时间戳
否
是
state ==
ESC_STATE_STARTING
&& fetGoodDetects >
fetStartDetects
是
state >=
ESC_STATE_STOP
PED
否
异常状态,每隔100检测下,
state==ESC_STATE_DISARMED
&& !(runMilis % 100)
是启动状态.切换到 运行状态
state =ESC_STATE_RUNNING;
digitalHi(statusLed); // turn off
得到时间差d = (t >= d) ? (t - d) : (TIMER_MASK - d + t);
油门输入模式是PWM模式
inputMode == ESC_INPUT_PWM
得到没有油门输入的时间间隔p
p = (t >= p) ? (t - p) : (TIMER_MASK - p + t)
是
丢失油门信号
p > PWM_TIMEOUT
runDisarm(REASON_PWM_TIMEOUT);
//pwm输入超时
是
State>=ESC_STATE_STARTING&&
d>ADC_CROSSING_TIMEOUT
否
adcAmpsOffset = adcAvgAmps;得到偏执电流
digitalTogg(errorLed);
是
否
占空比大于0
fetDutyCycle > 0
是
runDisarm(REASON_CROSSING_TIME
OUT); 过零超时
是
runArm();//手动运行起来
pwmIsrRunOn();//PWM开启输入比较
否
State>=ESC_STATE_STARTING &&
fetBadDetects>fetDisarmDetects)
否
是
占空比大于0
fetDutyCycle > 0
runDisarm(REASON_BAD_DETECTS);
//错误停止
是
否
否
停止状态
state == ESC_STATE_STOPPED
adcAmpsOffset =
adcAvgAmps; 得到
零偏
是
否
结束
Start阶段且好的过零检测大于
启动检测值才切换到run阶段
自动换向 Start run
得到当前离上次过零时间间隔
即 离过零过了d时间
Start 或者 run状态且 过零时间超过了
ADC_CROSSING_TIMEOUT
Start 或者 run状态且 坏的检测超了
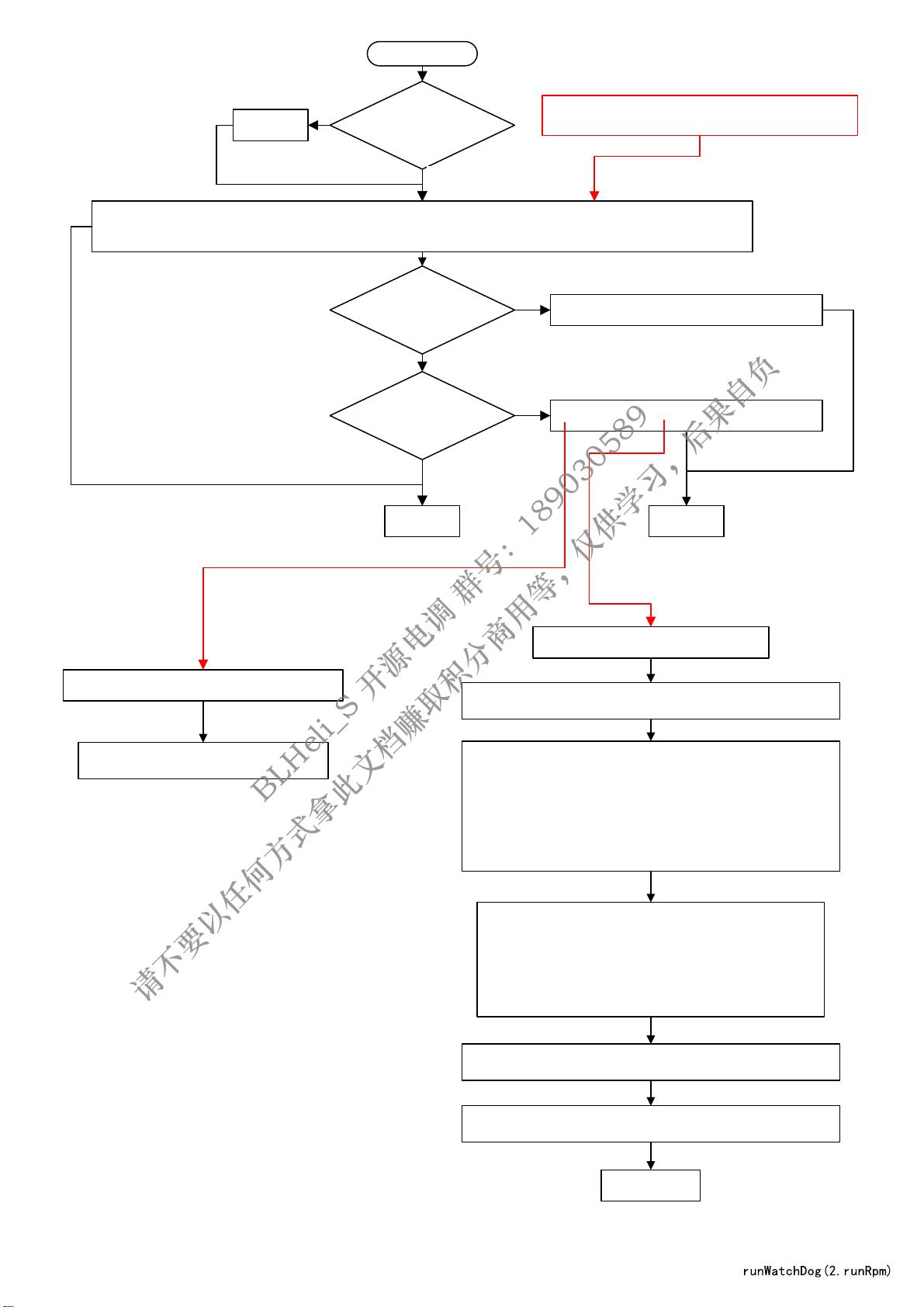
电子频率 f = 1/(6 * t ) 其中:t过零时间单位s f单位hz
电子转速 v = f * 60 其中:v单位 erpm
机械转速 w = v / 极对数 其中 w 单位是rpm
否
ESC_STATE_DISARMED = 0, //非正常停止状态
ESC_STATE_STOPPED, //停止状态
ESC_STATE_NOCOMM, //强拖状态
ESC_STATE_STARTING, //启动状态
ESC_STATE_RUNNING //运行状态
到这肯定是
ESC_STATE_DISARMED 状态
BLHeli_S 开源电调 群号:189030589
请不要以任何方式拿此文档赚取积分商用等,仅供学习,后果自负

剩余10页未读,继续阅读
资源评论

 贼仙呐2023-07-28这份文件对ESC32源码的分析提供了很好的指导,让人能够更加清晰地了解其工作流程。
贼仙呐2023-07-28这份文件对ESC32源码的分析提供了很好的指导,让人能够更加清晰地了解其工作流程。 杜拉拉到杜拉拉2023-07-28作者在解析流程图时,用简洁明了的语言,让读者可以轻松理解每个步骤的含义。
杜拉拉到杜拉拉2023-07-28作者在解析流程图时,用简洁明了的语言,让读者可以轻松理解每个步骤的含义。 萱呀2023-07-28通过这份文件的学习,读者能够对ESC32源码有一个全面的了解,是值得推荐的学习资料。
萱呀2023-07-28通过这份文件的学习,读者能够对ESC32源码有一个全面的了解,是值得推荐的学习资料。 lirumei2023-07-28文档不仅覆盖了基础知识,还深入探讨了一些高级概念,适合不同层次的读者。
lirumei2023-07-28文档不仅覆盖了基础知识,还深入探讨了一些高级概念,适合不同层次的读者。 山林公子2023-07-28文件中的实例和案例非常实用,能够帮助读者更好地掌握ESC32源码的原理。
山林公子2023-07-28文件中的实例和案例非常实用,能够帮助读者更好地掌握ESC32源码的原理。












