深度图(Depth Map)
需积分: 49 161 浏览量
2016-08-12
20:56:01
上传
评论 1
收藏 660KB DOC 举报


第十一章 深度图
获取场景中各点相对于摄象机的距离是计算机视觉系统的重要任务之一.场景中各点
相对于摄象机的距离可以用深度图(Depth Map)来表示,即深度图中的每一个像素值表示场
景中某一点与摄像机之间的距离.机器视觉系统获取场景深度图技术可分为被动测距传感
和主动深度传感两大类.被动测距传感是指视觉系统接收来自场景发射或反射的光能量,
形成有关场景光能量分布函数,即灰度图像,然后在这些图像的基础上恢复场景的深度信
息.最一般的方法是使用两个相隔一定距离的摄像机同时获取场景图像来生成深度图.与
此方法相类似的另一种方法是一个摄象机在不同空间位置上获取两幅或两幅以上图像,通
过多幅图像的灰度信息和成象几何来生成深度图.深度信息还可以使用灰度图像的明暗特
征、纹理特征、运动特征间接地估算.主动测距传感是指视觉系统首先向场景发射能量,
然 后 接 收 场 景 对 所 发 射 能 量 的 反 射 能 量 . 主 动 测 距 传 感 系 统 也 称 为 测 距 成 象 系 统
(Rangefinder).雷达测距系统和三角测距系统是两种最常用的两种主动测距传感系统.因
此,主动测距传感和被动测距传感的主要区别在于视觉系统是否是通过增收自身发射的能
量来测距。另外,我们还接触过两个概念:主动视觉和被动视觉。主动视觉是一种理论框
架,与主动测距传感完全是两回事。主动视觉主要是研究通过主动地控制摄象机位置、方
向、焦距、缩放、光圈、聚散度等参数,或广义地说,通过视觉和行为的结合来获得稳定
的、实时的感知。我们将在最后一节介绍主动视觉。
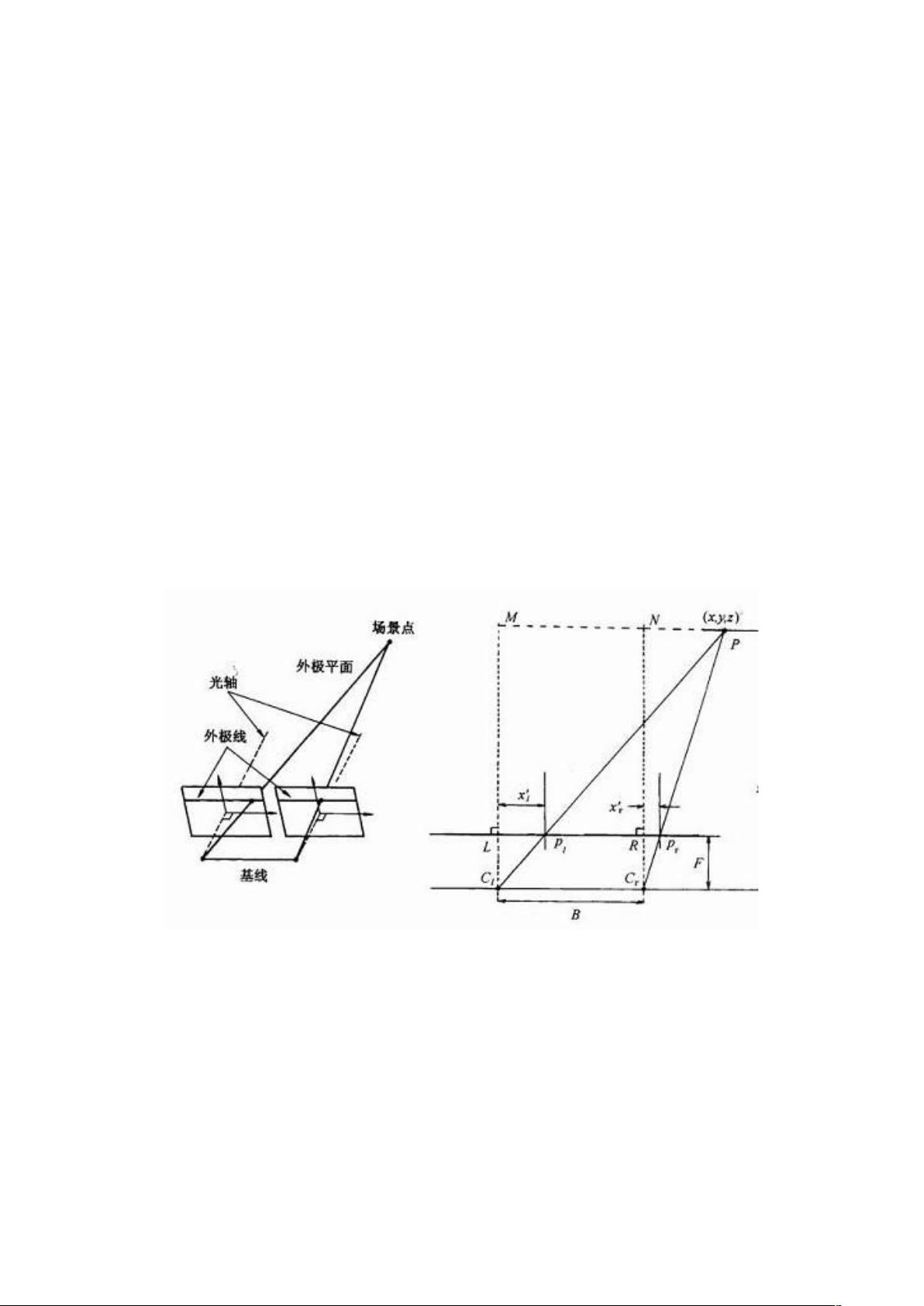
11.1 立体成象
最基本的双目立体几何关系如图 11.1(a)所示,它是由两个完全相同的摄象机构成,
两个图像平面位于一个平面上,两个摄像机的坐标轴相互平行,且 轴重合,摄像机之间
在 方向上的间距为基线距离 .在这个模型中,场景中同一个特征点在两个摄象机图像
中国图象图形网 www.image2003.com
剩余28页未读,继续阅读
资源评论













