捷联式惯性导航
需积分: 9 136 浏览量
2015-10-16
10:11:00
上传
评论 1
收藏 1.6MB DOC 举报

传感器输出 9 轴数据:
陀螺仪三轴数: Gyrx,y,z
加速度记三轴数据:Accx,y,z
磁力记三轴数据:Magx,y,z
数据准备:对加速记和磁力记进行平均值滤波。
Accx=(AccX1+X2+………..+X20)/20
Accy=(AccY1+Y2+………..+Y20)/20
Accz=(AccZ1+Z2+…………+Z20)/20
Magx=(MagX1+X2+………..+X20)/20
Magy=(MagY1+Y2+………..+Y20)/20
Magz= (MagZ1+Z2+…………+Z20)/20
因为对传感器需要校准,最后的数据:
Gyrx=Gyrx-零偏值(-25)
Gyry=Gyry-零偏值(10)
Gyrz=Gyrz-零偏值(17)
Accx=Accx* 加 速 度 记 校 准 参 数 ( 0.000121 ) + 加 速 度 记 校 准 参 数
(0.002140)*1000
Accy=Accy* 加 速 度 记 校 准 参 数 ( 0.000122 ) + 加 速 度 记 校 准 参 数
(0.005412)*1000
Accz=Accz* 加 速 度 记 校 准 参 数 ( 0.000121 ) + 加 速 度 记 校 准 参 数 ( -
0.088853)*1000
Magx=Magx*磁力记校准参数(0.007985)+磁力记校准参数(-0.96191)*1000
Magy=Magy*磁力记校准参数(0.008149)+磁力记校准参数(0.290058)*1000
Magz=Magz*磁力记校准参数(0.006699)+磁力记校准参数(-0.285110)*1000
四元数初始化
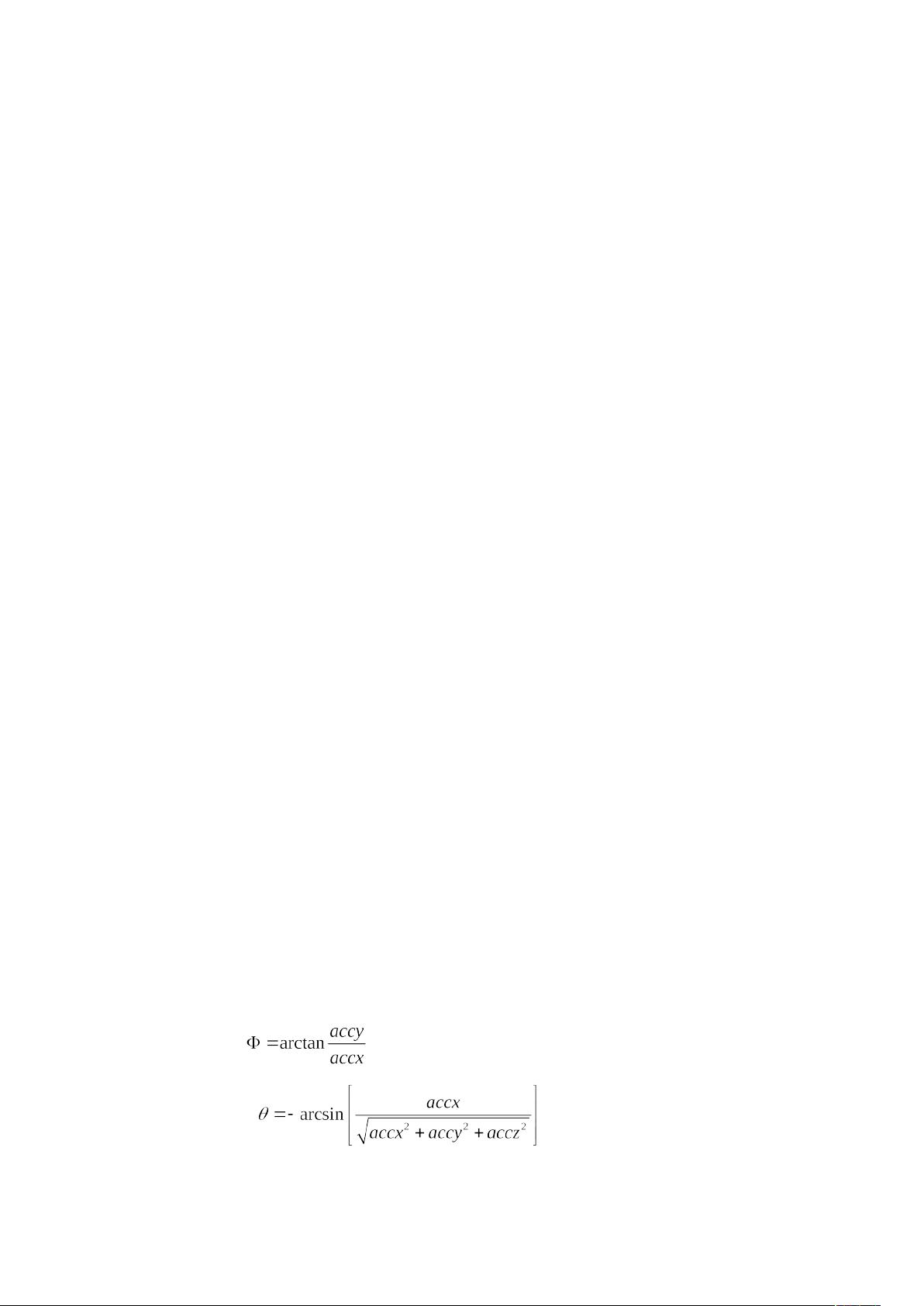
滚动角 roll:
俯仰角 pitch:
资源评论













