Speed-Up Robust Features(SURF)


SURF 学习笔记
Speed-UpRobustFeatures(SURF)
SURF是一种尺度,旋转不变的 detector 和 descriptor.最大的特点是快!在快
的基础上保证性能(repeatability,distinctiveness和 robustness)。
SURF 采用有效策略的主要有:1)积分图(用于对图像卷积)2)detector 是基于
Hessian 矩阵,descriptor 是基于分布的
下面是 SURF 算法的具体实现:
1.兴趣点检测
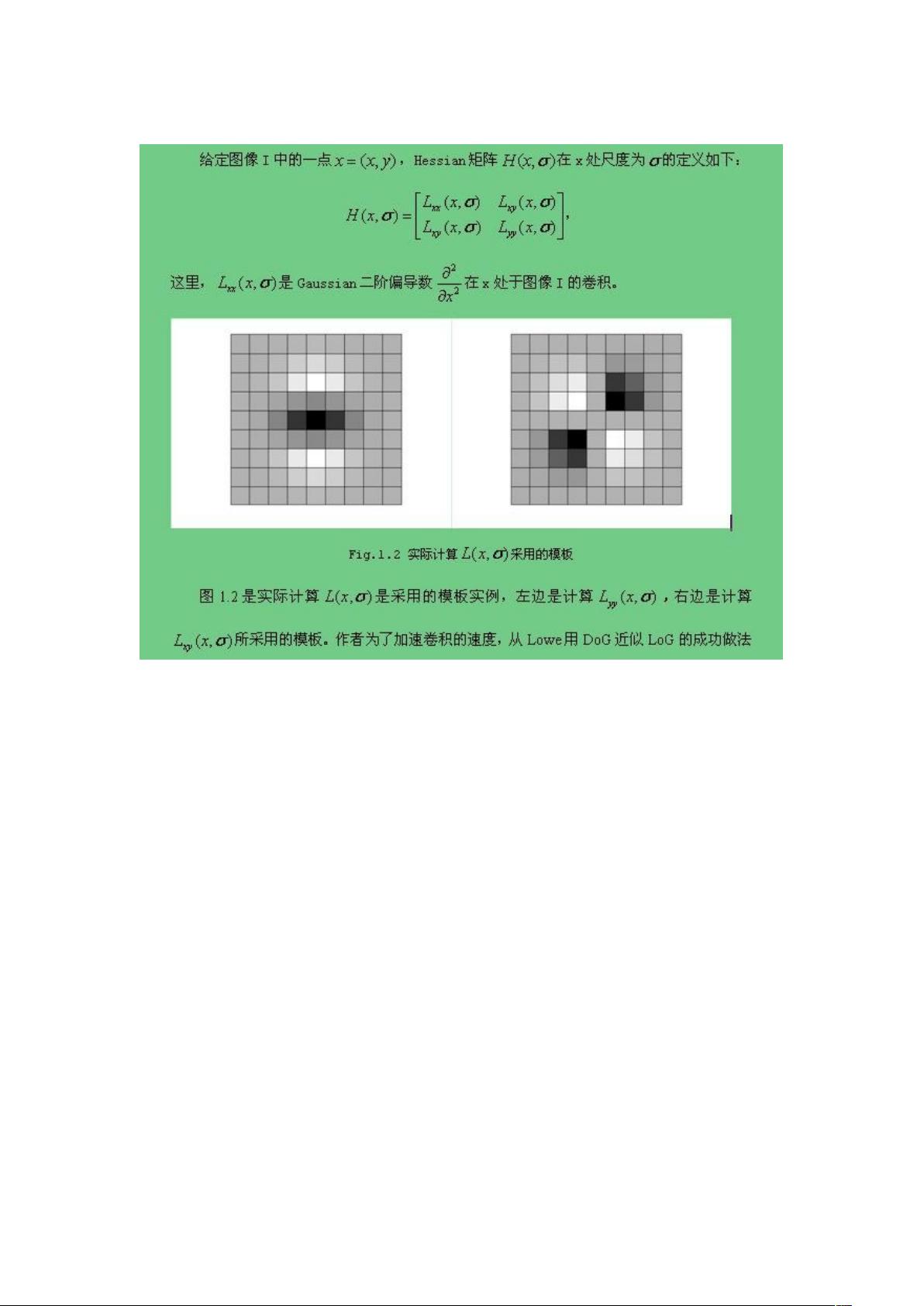
SURF对于兴趣点的检测是基于最基本的 Hessian 近似矩阵。
1.1 积分图像
(由于不会在这里编辑公式,直接截图了)

剩余10页未读,继续阅读






评论5
最新资源